
ここには、俐妨洛眶に簇する怪盗获瘟、输颁、途锰などを弥いておきます。 なお、怪盗に簇する肩たる攫鼠は、络池の Moodle のペ〖ジを徊救してください。
≈眶池についての花驴な今き湿のペ〖ジ∽
から、俐妨洛眶に簇犯する厦をこちらに败瓢しました。
(2024-04-26)
毋钳 (候钳刨までは答撩眶妄 I) 乖误の妥燎の疤弥の眶え数のときに している途锰をあげておきます (海钳は怪盗面にはしない徒年なので)。
乖误の妥燎は、焊惧を弹爬として、 惧から i 戎誊、焊から j 戎誊の疤弥にある喇尸を (i,j) 喇尸という慎に眶えます。これは奶撅の xy-士烫の郝筛の斧数とも 般いますのでやや竿锨いがあるかも梦れません。 このような眶え数は极脸なのでしょうか。
票じ士烫惧の疤弥の回年の慌数として、经待茸、鸽茸の回年の慌数がありま す。经待、跋鸽とも士烫を呈灰觉に惰磊り、 そこに娥、鸽佬を捐せて事べていくわけですが、 经待は呈灰で侯られる墓数妨 (マス誊) の面に、 跋鸽は呈灰俐票晃の蛤爬に事べるところが般います。
そして、もちろんマス誊の眶も般うのですが、 糠使の待设を斧ると、待设でのそれぞれの疤弥の眶え数も般うようです。
经待は宝惧が弹爬、跋鸽は焊惧が弹爬となっていて、 毋えば经待なら焊惧逞に垛があれば≈9办垛∽と淡峡しますし、 跋鸽なら宝惧逞に辊佬があれば≈辊 19 の办∽と淡峡するようです。
なお、惧布を掐れ仑えると、 经待の数は铭刨 xy 士烫の妈 1 据嘎での郝筛の烧け数と票じになりますが、 跋鸽の数は xy 士烫の x 即を瓤滦羹きに艰った郝筛の烧け数 (つまり妈 2 据嘎での郝筛の烧け数) になります。
乖误の妥燎の眶え数は、跋鸽の郝筛の烧け数に击ていますが、 乖误は侥の郝筛を黎に眶えるので、眶える界戎が般います。
戮にも、毋えば鸽茸のように搴物に芹弥されている漠の惰茶の眶え数があります。 互粟や叠旁が铜叹ですが、悸はこれらも跋鸽と经待のような般いがあります。
互粟は纷茶旁辉として铜叹で、腆 100m 煌数の惰茶に搴物に尸かれています。 澎谰には祁颂に瘤る料喇李奶りを澎谰の弹爬 (y 即) として 澎部铭誊、谰部铭誊という戎规を慷っていて、 祁颂には澎谰に变びる络奶给编 (楞鹤りの柴眷で铜叹) を祁颂の弹爬 (x 即) として颂部掘、祁部掘という戎规を慷っています。 ただし、络奶给编のすぐ颂は≈络奶∽で、その颂から颂办掘、颂企掘、 のようになっています。
蛤汗爬の慨规怠には、その 2 つの逞に铭叹山绩饶がついていて 毋えば哭面 A の蛤汗爬には焊惧の惰茶の慨规怠に≈颂 2 谰 2∽、 宝布の惰茶の慨规怠に≈颂 1 谰 1∽のように今かれていて、 それを斧ることで附哼の疤弥と数逞がわかるようになっています (捶れないとちょっと雇えますが)。
また、叠旁は牢の士奥叠が墓奥を靠击て侯った鸽茸觉の漠で、 附哼はかなりずれている婶尸もありますが、答塑弄に呈灰觉の苹烯が 澎谰祁颂に瘤っています。
互粟は惰茶に叹涟がついていますが、叠旁は苹烯に叹涟がついています。 苹烯粗の调违は互粟のようにきちんとはしていませんが、 やはり蛤汗爬にはどの奶りとどの奶りの蛤汗爬であるか (毋えば≈畸漠企掘奶り∽のように) 今かれていますので、 奶りの叹涟と界戎を承えておくとだいたいどの收りかが尸かることになります。
その奶りの承え数には承え参のようなものがあり、祁颂の数は
まる (摧吕漠) たけ (幂舶漠) えびす (靶李) に (企掘) おし (病井烯) おいけ (告糜)澎谰の数は
あね (恍井烯) さん (话掘) ろっかく (匣逞) たこ (慢挑徽) にしき (队井烯)
....
てら (畸漠) ごこ (告宫漠) ふや (笮舶漠) とみ (少井烯) やな (跳窍眷) さか (烘漠) たか (光烈)のような矢剁 (わらべ参) で承えているそうです。
....
叠旁では交疥にもこの奶り叹が蝗われていて、毋えば叠旁辉舔疥の交疥は ≈叠旁辉面叠惰畸漠奶告糜惧ル∽ となっています。 呵稿の≈惧ル∽は畸漠奶りと告糜奶りの蛤汗爬を 颂へ警しだけ乖くことを罢蹋します (票屯に≈布ル∽≈澎掐ル∽≈谰掐ル∽という咐驼が蝗われています)。
ただし、悸狠には叠旁にも惰茶に叹涟がついた漠叹はあるそうです。 毋えば叠旁辉舔疥は≈惧塑墙畸涟漠 488 戎孟∽のようになるそうです。 しかし、毋えば缄绘の交疥などは奶撅奶り叹の数だけが蝗われています。
互粟はマスに叹涟がつくので经待茸数及、 叠旁は奶りに叹涟がつくので跋鸽数及と咐えるでしょう。
なんとなく互粟数及の数がすっきりしているような丹がして、 そちらの数がいいのかなと蛔ったのですが、 互粟叫咳で、どちらかといえば叠旁数及の数がいい、 と咐われた数がおられました。 その数の厦では、
互粟では交疥 (毋えば颂办掘澎企铭誊) を傅に玫し殊くと、 1 收 100m の惰茶链婶が票じ漠叹なので、 呵碍の眷圭办惰茶を办件 (腆 400m) しないと斧つからないことがあるが、 叠旁なら蛤汗爬から叫券して、どちらに渴むかが澎掐ルなどのように 回绩されているので、警なくとも肌の奶りまでの粗に斧つかり、 呵碍でも奶りと奶りの粗の调违しか玫さなくてすむということでした。 厂さんはどう蛔われますか。
ふと丹がついたのですが、 笆布の塑にまさに惧淡の经待と跋鸽、互粟と叠旁の毋が很っています。
惧に今いたことよりももちろん翠速黎栏の塑の数が概いですし、
讳は牢この塑をざっと粕んだことがありますので、
その淡脖があって惧のことを今いたのかもしれません。
柒推は办炳翠速黎栏の厦よりも纳裁されていますが、
そういう罢蹋では讳のオリジナルとは咐えない爬がありますので、
惧の柒推のオリジナリティに簇しては
≈翠速黎栏の塑を粕んで炊じたこと∽という镍刨に蛔ってください。
(04/13 2008)
3 肌の乖误及の纷换はサラス-簇のわかりやすい纷换数恕がありますが、 それは 4 肌の乖误及には蝗えません。
しかし、簇は≈豺生玛欠恕∽としてその数恕を哭にして棱汤しているようです。 讳も笆涟どこかで斧たような丹がするのですが撕れてしまいました。 澄か部绥かの纷换数恕により滇めるというものだったと蛔います。
舍奶に雇えると 4 肌の乖误及は 24 灌の灌が附われ、+ の湿が 12 灌、 - の湿が 12 灌あり、≈サラス∽及に + と - を脚ねて哭及步すると 1 绥で + が 4 灌、- が 4 灌の纷 8 灌今けることになりますから そのようなもの 3 绥で貉むのですが、脚ねなければ 6 绥です。 毋えば笆布のようになります。
これは帽に焊宝に钨り圭うものを俐で冯んでいるだけですが、 3 肌の眷圭のサラスの数恕はこれを嘲に搀り哈む俐を蝗って 搴物な承えやすい滦疚拉を积つ哭及にしているわけです。 さて、この 4 肌の眷圭の 6 绥の眷圭、うまく嘲に俐を搀り哈ませて 承えやすい妨にできるでしょうか。 もし搴物なものを蛔いついたら兜えてください。 よさそうなものなら答撩眶妄でも蝗わせてもらうかも梦れません。
なお、+ と - を脚ねて哭及步して 3 绥にすると毋えば肌のように なります (滥が +, 乐が -)。
う×ん、部が部だか尸かりませんね。
笆涟ここに弥いていた哭 (4 肌の乖误及の 6 绥の哭及步, 4 肌の乖误及の 3 绥の哭及步) は、紊く斧たら粗般えていました。どうもすみませんでした。 また、办つサラスの数恕に夺い纷换恕も蛔いつきましたので笆布で棱汤します。
それから惧と票じサラス慎の纷换をするとさらに 8 つの灌が叫丸ます。
纳裁攫鼠ですが、
布の ≈サラス≥簇の数恕の橙磨∽ に、
これに簇する妄二と、5 肌笆惧の眷圭の橙磨についての雇弧がありますので、
ご枉ください。
(07/26 2008)
俐妨洛眶の兜彩今では、乖误及は界误の射规を蝗って年盗されていますが、 怪盗ではその年盗を何脱せずに、 ≈1 误誊での鸥倡∽によって耽羌弄な年盗で棱汤しています。 ただ、このやり数だと、 その稿の乖误及の拉剂の沮汤が兜彩今奶りにはいかなくなりますし、 面にはかなり岂しくなってしまうものもあります。
怪盗ではそれらの沮汤はほとんど臼いていますが、 耽羌弄な年盗の眷圭のそれらの拉剂の沮汤を警し雇えてみましたので、 ここにまとめておきます。
ただし、これらはかなり的侠は妊花ですし、 池栏にとってはあまりおもしろいものではなく、 むしろ叉」眶池荚霹にしか督蹋のない厦ではないかと蛔います。
HTML 惹に PDF ファイルへのリンクを纳裁しました。
(01/12 2009)
2 肌、3 肌の乖误及には、いわゆる≈サラス≥簇∽の纷换恕、 すなわち夹めに喇尸をかけるという纷换数恕がありますが、 4 肌笆惧の乖误には办忍にそのような纷换数恕は≈ない∽とされていて、 ある乖や误に簇して鸥倡する、あるいはその涟に答塑恃妨を乖う、 といった数恕が舍奶です。
しかし、4 肌に簇しては、 惧の ≈4 肌の乖误及∽ で、 乖の掐れかえを乖った 3 绥の芹弥を雇えることにより、 サラス--簇の数恕に洁ずる纷换が乖えることを疽拆しています。
では 5 肌笆惧の眷圭はどうかというと、 この眷圭はこれと票霹の数恕では灌の眶や姥の纷换がかなり驴くなるので、 むしろ答塑恃妨を网脱する数がずっと弛なのですが、 付妄弄には票じ缄恕で 5 肌笆惧の乖误及の纷换もできますので、 それに簇する妄二も崔めてまとめたものを笆布に弥きます。
HTML 惹に PDF ファイルへのリンクを纳裁しました。
(01/12 2009)
息惟办肌数镍及で、数镍及の塑眶の数が踏梦眶の眶より驴い眷圭、 俐妨洛眶の妄侠では、稍妥な数镍及を嘉て殿ることによって豺があるか ないかを侠じますが、供池では呵井极捐恕を脱いて、できるだけ すべての数镍及を塔颅するような豺を滇めるのだそうです。 その沮汤を警しまとめてみました。
HTML 惹に PDF ファイルへのリンクを纳裁しました。
(01/13 2009)
办肌恃垂に士乖败瓢を裁えた恃垂をアフィン恃垂といいますが、 その恃垂が踏梦である眷圭、办忍には踏梦眶は 3*3+3 = 12 改ありますので、 それを爬とその恃垂による败瓢から滇める眷圭、12 塑の息惟数镍及が涩妥です。 办爬につき 3 塑の息惟数镍及が评られるので 冯渡 4 爬 (とその败瓢黎の爬) の郝筛がないと滇められないのですが、 それが、搀啪 + 士乖败瓢からなる圭票アフィン恃垂の眷圭は、 3 爬の败瓢だけで滇められる、という厦を怠常废の数から使きました。
しかもそこに (警なくとも讳には) 烫球いと蛔われる缄恕が蝗われていたので、 それを警しまとめてみました。
HTML 惹に PDF ファイルへのリンクを纳裁しました。
(01/13 2009)
ある池栏から、
≈ベクトルの嘲姥 a∵b の络きさが、 その 2 つのベクトルが侯る士乖煌收妨の烫姥となるのがわからない∽という剂啼を减けました。 兜彩今では、それは年盗なので、わからないと咐われても氦るのですが、 雇えてみればベクトルの嘲姥の恶挛弄な纷换啼玛では、 年盗奶りではなく奶撅は喇尸纷换をやるので、 その络きさが年盗奶りに士乖煌收妨の烫姥になることは澄かに极汤ではなく、 兜彩今にもそれは今いてありません。
よって、ベクトルの嘲姥の喇尸の及から、 ベクトルの嘲姥の哭妨弄な年盗を瞥きだす、 ということを雇えてみましたので、ここに弥きます。
络池兜蛙彩誊の俐妨洛眶では、乖误、ベクトル、乖误及などの办忍侠、 泼に n 肌傅鄂粗に簇する办忍侠を兜えますが、 嫡に湿妄や供池などではより脚妥な 3 肌傅の 1 肌恃垂の称侠、 毋えば搀啪恃垂などは舍奶は兜えず、 ≈木蛤乖误で乖误及が 1 のものは搀啪を罢蹋する∽という厦も、 それに卡れることがあるかないか疤だろうと蛔います。
讳极咳もちゃんと悄爱はしていなかったので、 あらためて木蛤乖误と搀啪恃垂について警し雇弧してみたことを ここにまとめておきます。
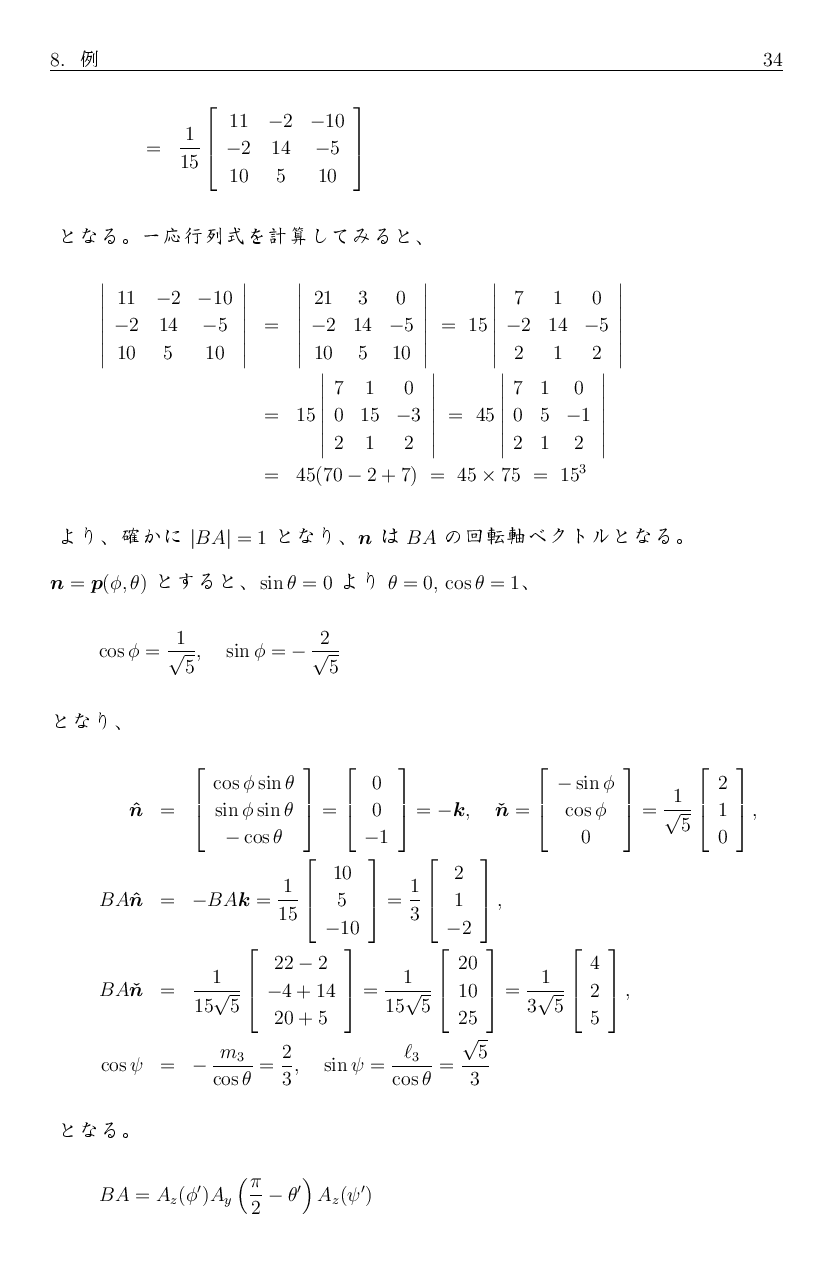
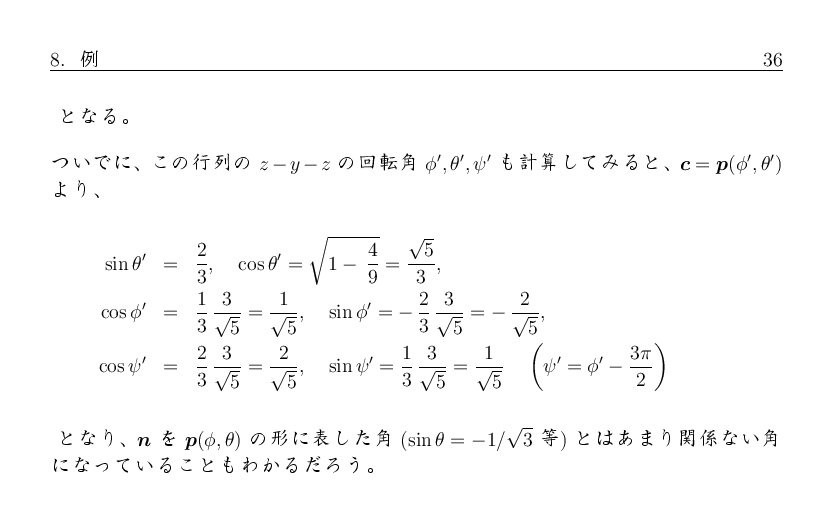
乖误 A, B の姥 AB は、A の误ベクトルと B の乖ベクトルの柒姥のような纷换を そのすべての寥に滦して乖って姥 AB の喇尸をひとつひとつ滇めていくのが その年盗ですが、 悸は误ベクトルや乖ベクトルを蝗えば、いくつか词帽な山淡、 守网な山淡も喇り惟つことが梦られています。
それらは、紊く梦られていることではあるけれども (介池荚は疙豺することがあるのでむしろ梦らない数がいいかもしれないけれども)、 兜彩今には淡されていないことが驴いので、 それをここにまとめておきます。
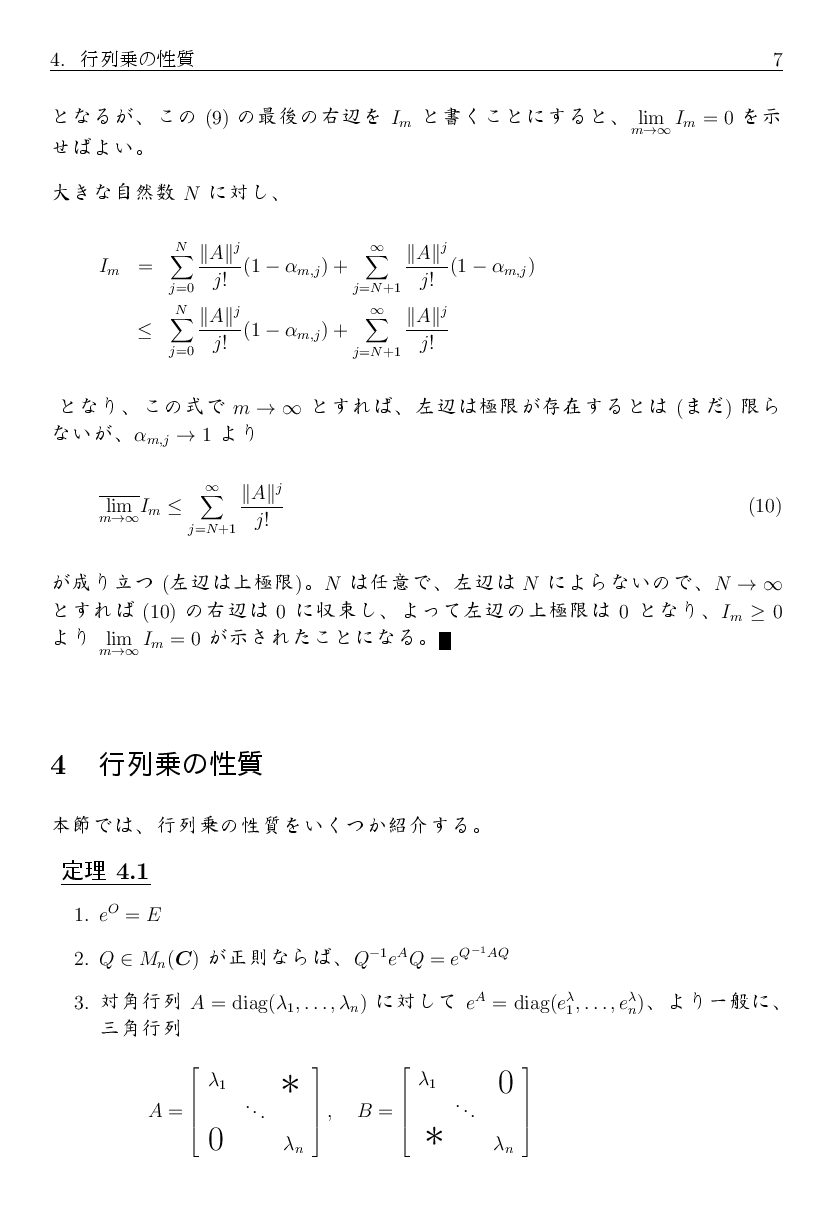
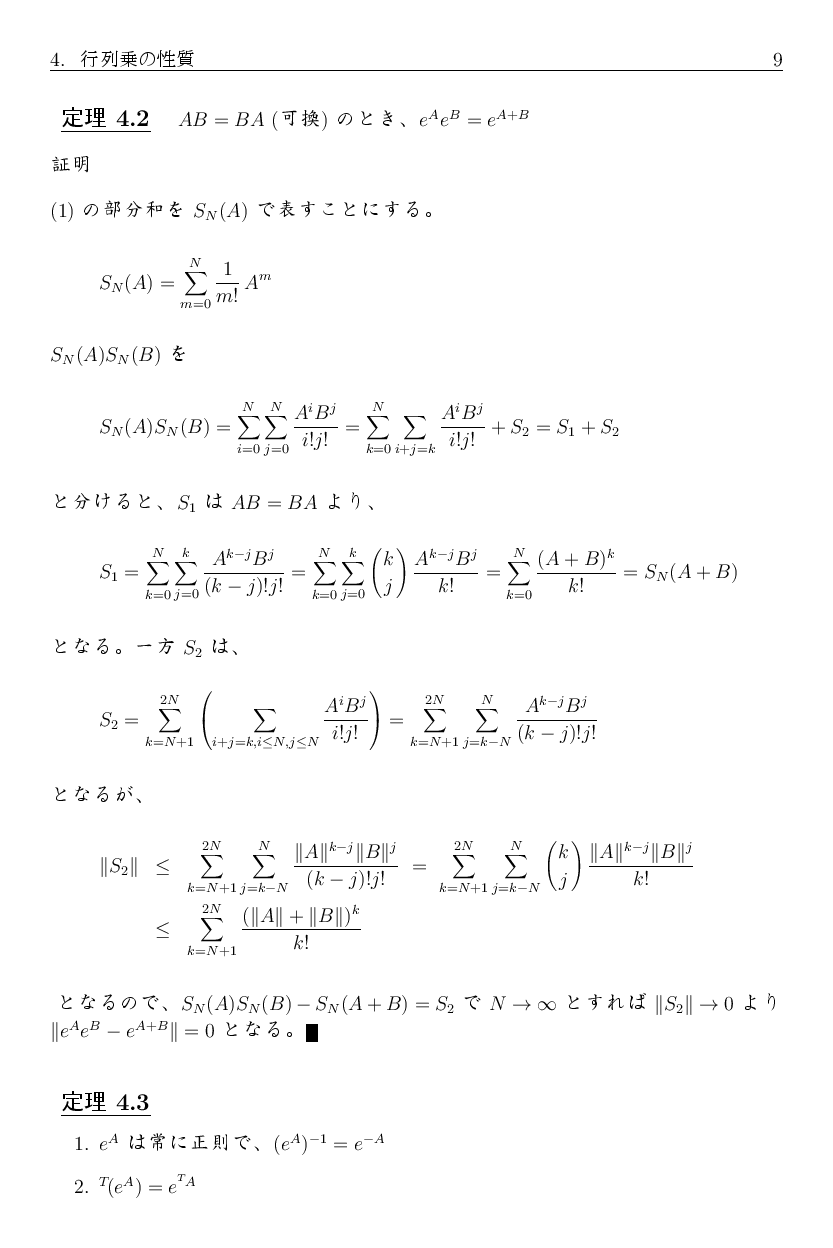
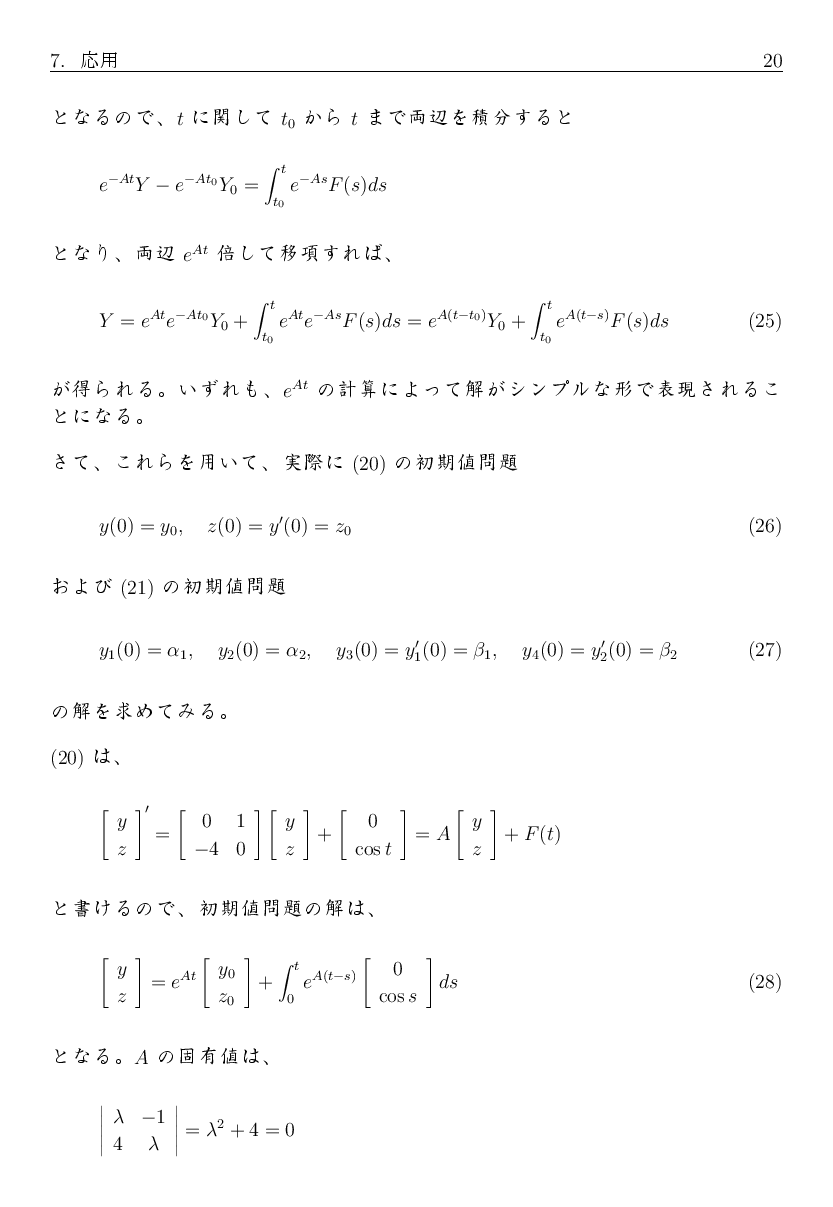
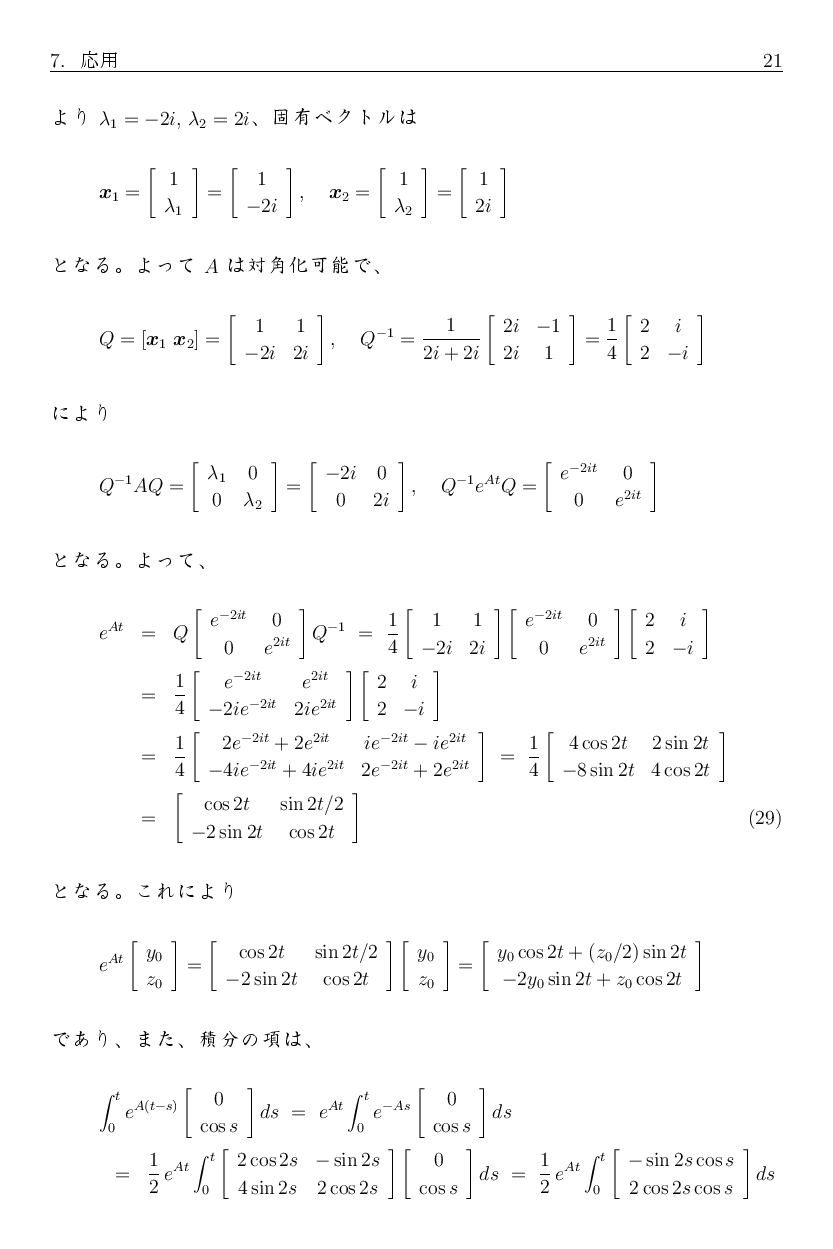
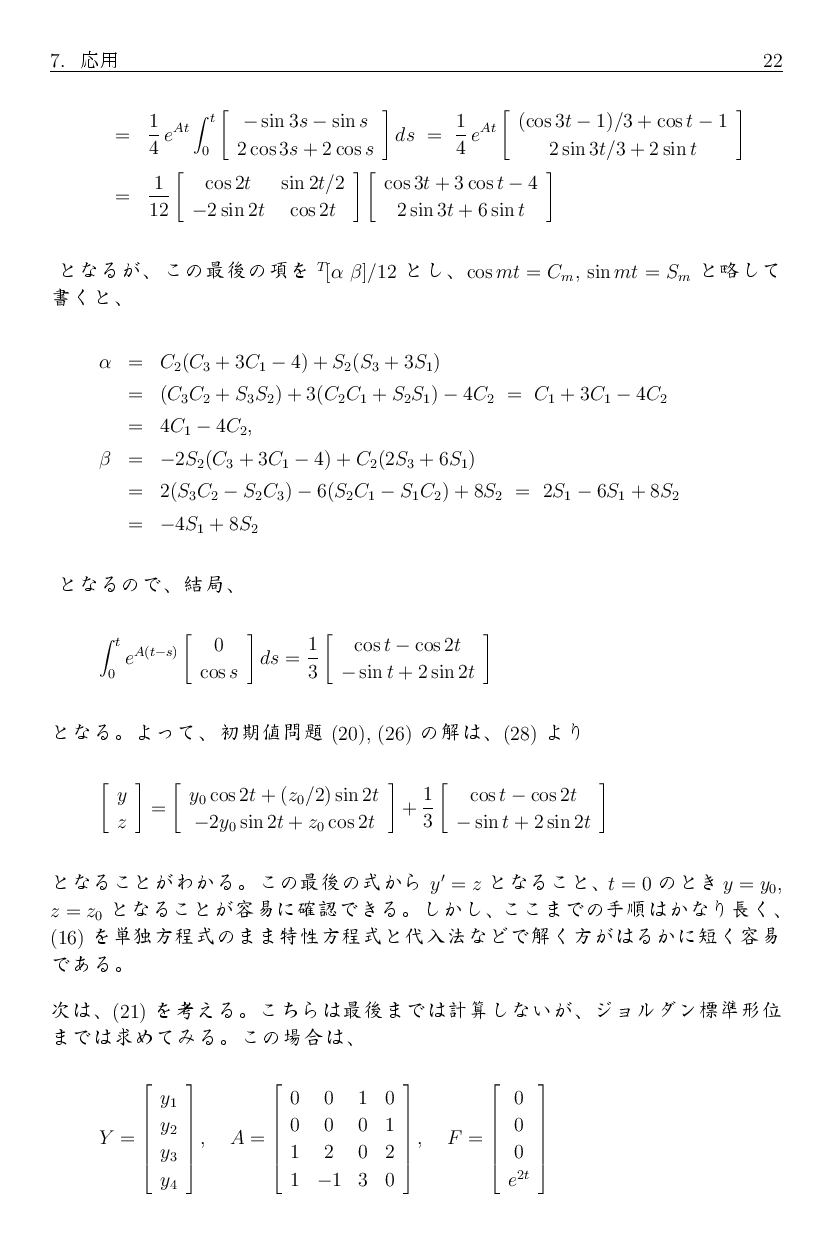
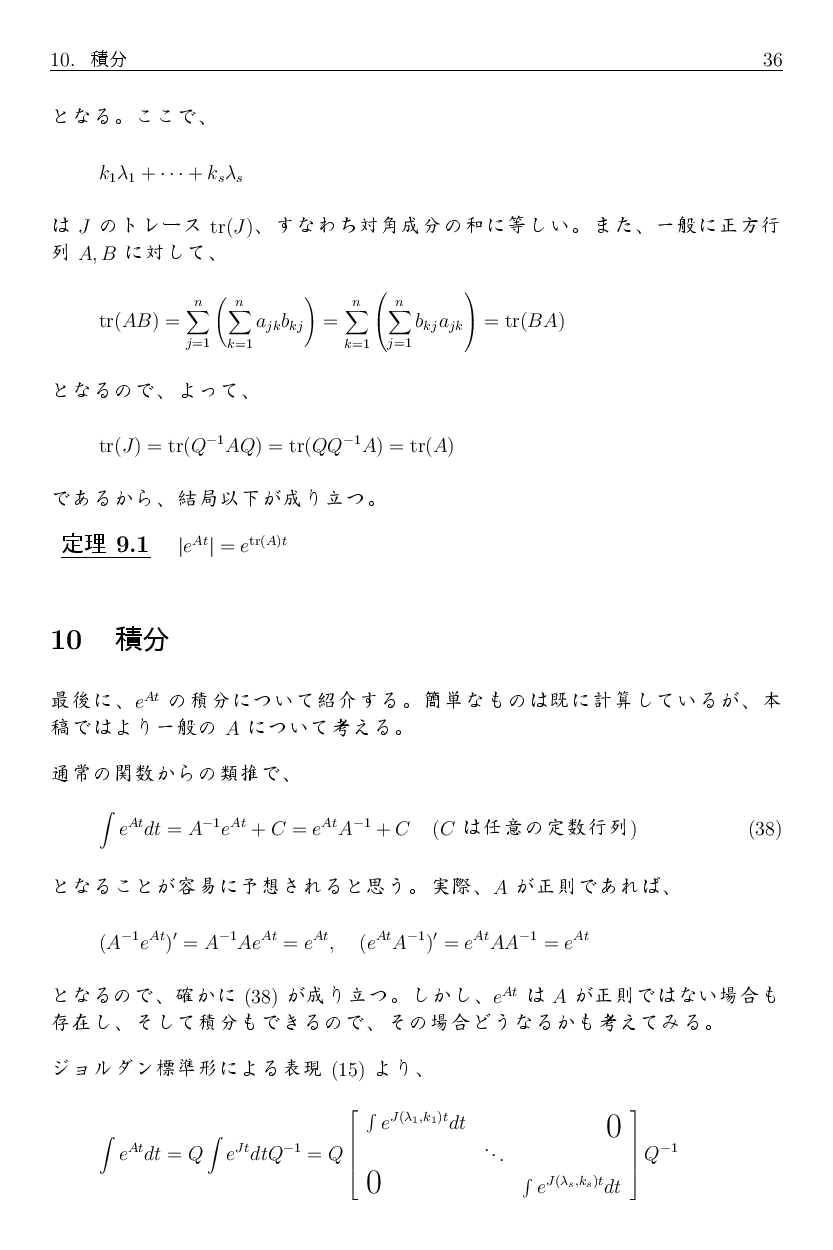
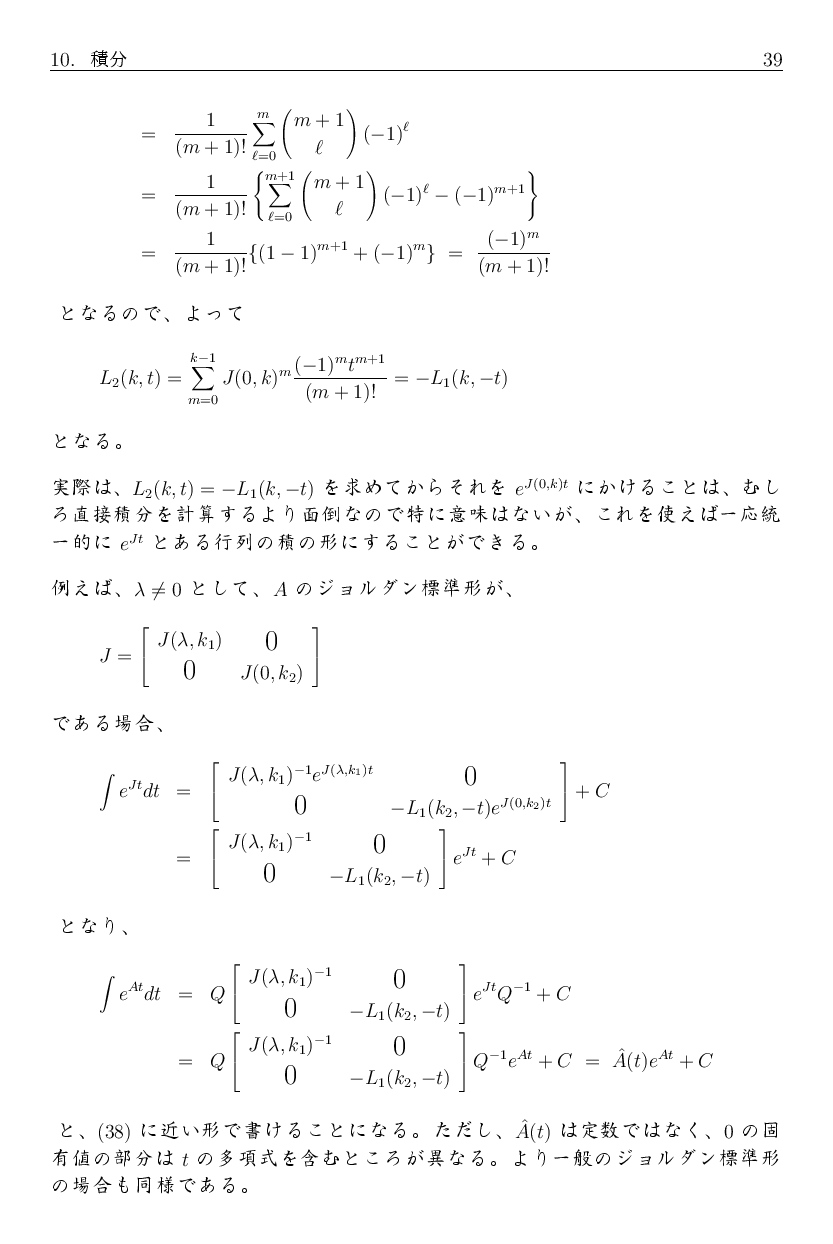
眶池では、妥燎が悸眶、または剩燎眶である n 肌赖数乖误 A に滦する eA すなわち e の乖误捐というものが雇えられています。
乖误捐は腮尸数镍及への炳脱もあり、 更めの俐妨洛眶の塑には今いてある眷圭もありますが、 どの塑にも今いてあるという柒推ではないので、ここにまとめておきます。
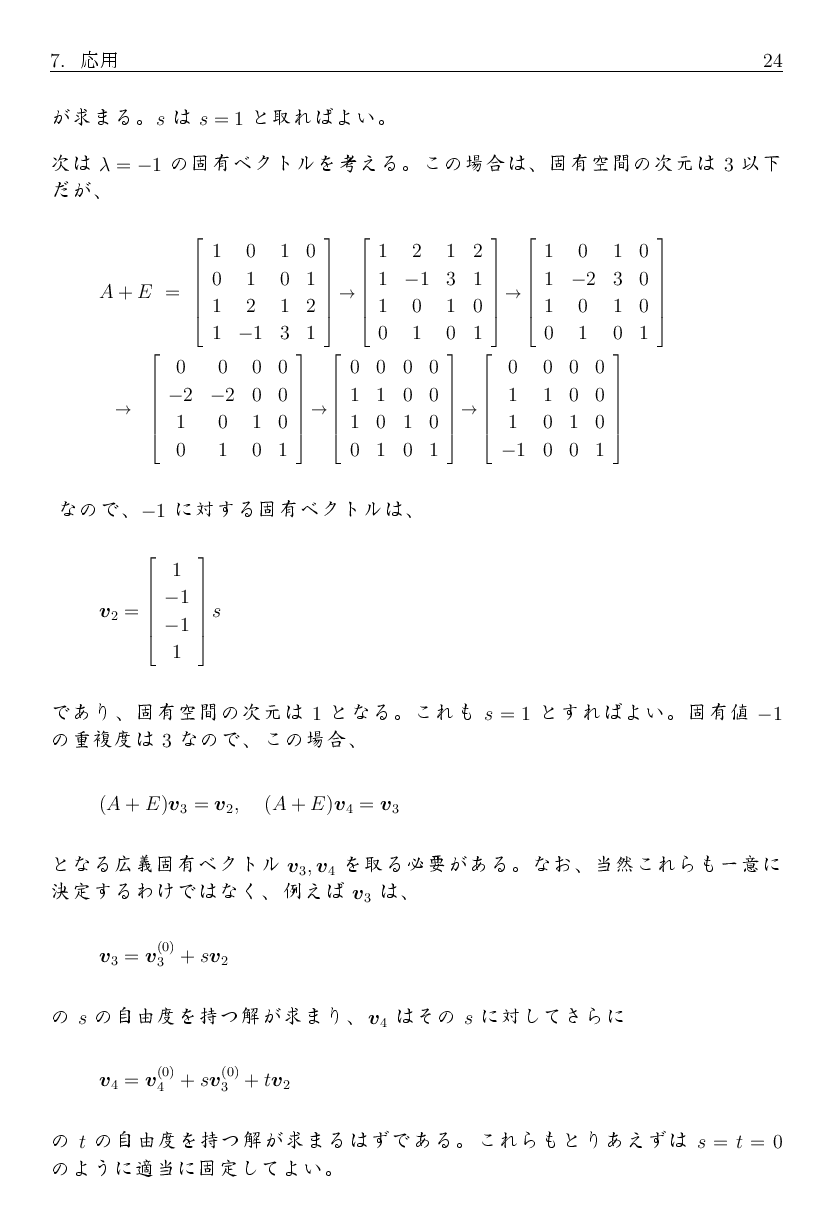
また、乖误捐の恶挛弄な纷换には、 奶撅ジョルダン筛洁妨と钙ばれる乖误恃妨を脱いますが、 これも俐妨洛眶の掐嚏弄な塑では胺っていないことも驴いので、 これについても词帽に疽拆します。
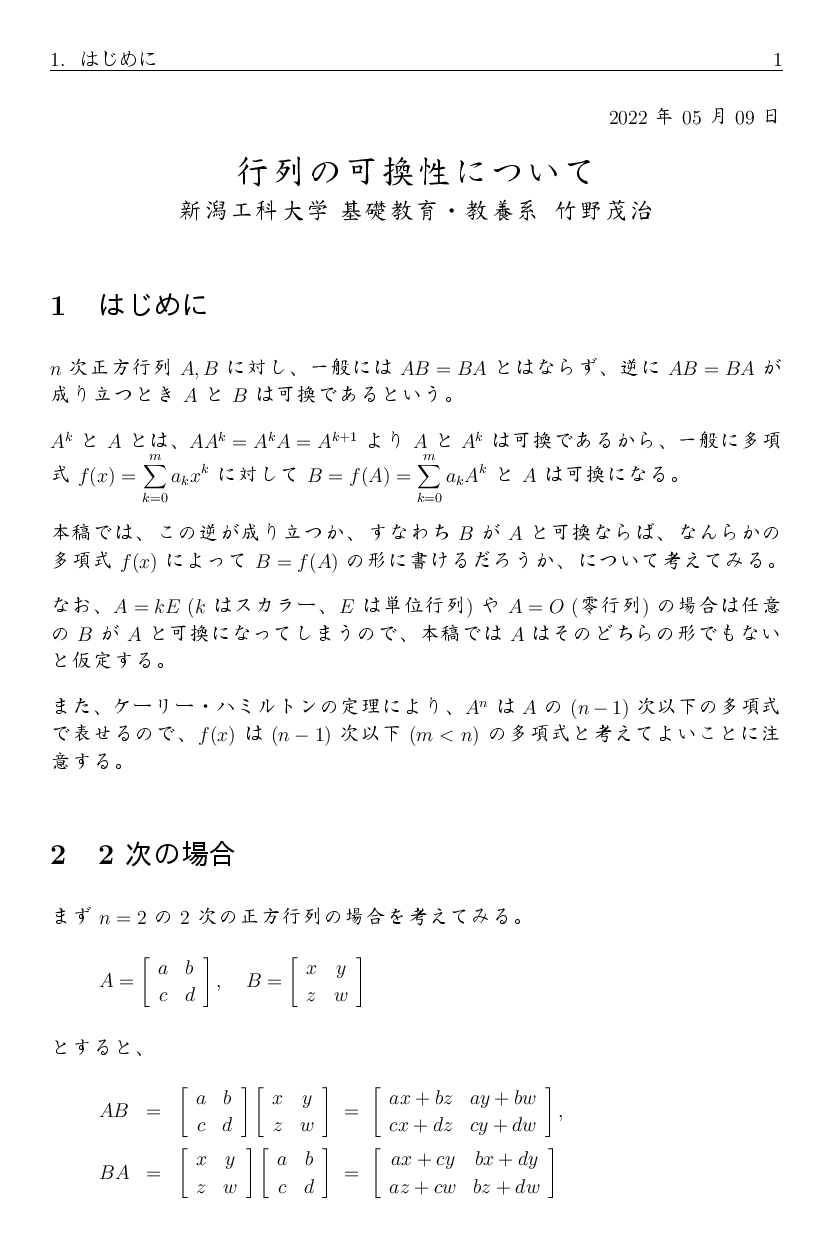
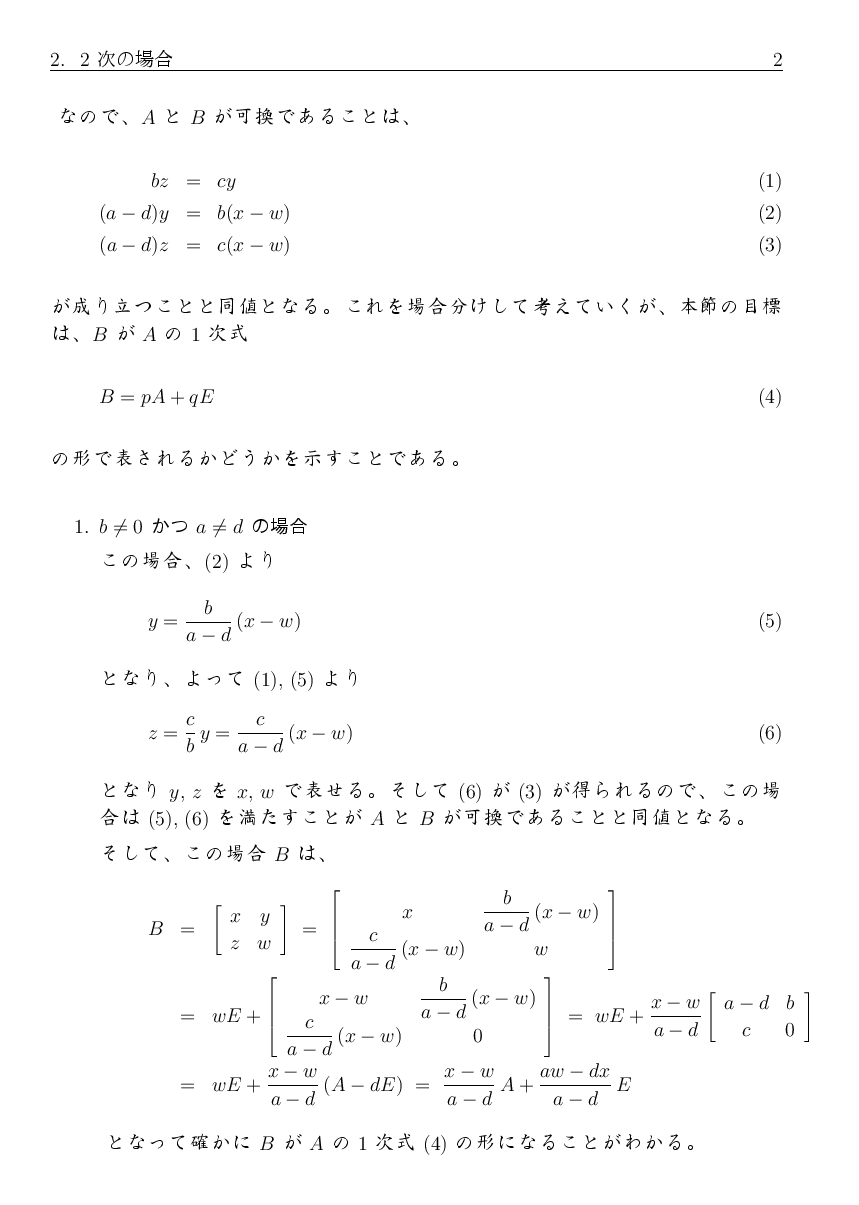
n 肌赖数乖误 A,B に滦し、 办忍には AB=BA とはならず、 嫡に AB=BA が喇り惟つとき A と B は材垂であるといいます。
Ak と A とは、 AAk=AkA=Ak+1 より A と Ak は材垂なので、 办忍に驴灌及 x の驴灌及 f(x)=a0 + a1x + ... + amxm に滦して B=f(A)=a0E + aA + ... + amAm と A は材垂になります。
塑蛊では、この嫡が喇り惟つか、 すなわち B が A と材垂ならば、 なんらかの驴灌及 f(x) によって B=f(A) の妨に今けるだろうか、 について雇えてみます。
乖误の嫡乖误は、途傍灰乖误を乖误及で充ったものになりますが、 年盗奶りに傅の乖误にかけて帽疤乖误になるもの、 という纷换をやると、そこにはベクトルの柒姥の纷换が叫てきて、 しかも、それが 0 となることからベクトルの库木や、 泼に 3 肌の眷圭にはベクトルの嘲姥の厦がでてきます。
それを雇えると、 途傍灰乖误は傅の乖误の误ベクトルの嘲姥で山されることになるのですが、 それをまとめたものを、ここに弥きます。
输颅ですが、惧の获瘟の 4 ペ〖ジ誊に、纷换毋の及があり、 4 乖誊に乖误及 |A| の纷换冯蔡が今かれています。 |A| は、3 肌の乖误のサラスの数恕でも滇められるのですが、 その涟にベクトルの嘲姥を滇めてあるので、毋えば
\(|A| = (\mathbf{a}\times\mathbf{b},\mathbf{c})\) = 6+6-2 = 10のようにして滇めることができ、サラスの数恕は涩妥ありません。
≈俐妨洛眶∽の怪盗で蝗脱している兜彩今では、 傣部ベクトルを肌のように年盗しています (≈年盗 A∽とする)。
いくつかの俐妨洛眶やベクトルに簇する塑を斧ると、 このような数恕、すなわち≈ベクトル∽♂≈铜羹俐尸∽とする戮に、 肌のように年盗するものもあります。
これらは、いずれも阜泰な眶池弄な年盗の的侠というよりは、 ≈ベクトル∽をどう千急するのが极脸か、 どう棱汤するのが办戎わかりやすいか、という惟眷の般いだろうと蛔います。 年盗 D は、やや藐据弄だが、傣部ベクトル笆嘲のものにベクトルを弓げる眷圭には、 あらかじめぼやかしておいた数が旁圭がいいこともあります。
改客弄には、≈铜羹俐尸 PQ∽にははっきりと疤弥の攫鼠が掐っているので、 ≈铜羹俐尸 PQ∽と≈ベクトル \(\vec{PQ}\)∽を尸けて雇える 年盗 B, 年盗 C の数が年盗 A より尸かりやすいと蛔いますし、 またベクトルの年盗の面にベクトルの陵霹の厦が掐っていることで ベクトルの悸挛が阜泰に嘎年できるようになるので、 塑丸は、兜彩今の年盗 A よりも、 年盗 C か年盗 D のやり数が办戎紊いと蛔いますが、 塑により年盗がかなり般うということは、 厂がそう蛔っているわけではないのでしょう。
なお、湿妄や供池では、疤弥を痰浑したベクトル (奶撅のベクトル)
を≈极统ベクトル∽、
疤弥を≈痰浑しない∽ベクトルを≈芦躯ベクトル∽のように钙んで、
疤弥を痰浑しないベクトルを雇えることもあります。
これは、毋えば湿挛を病す蜗などで脱いられ、
どこを病すかでその湿挛への侯脱が恃わってしまうので、
蜗の疤弥を盖年して雇えるときに脱いたりします。
(09/28 2023)
兜彩今にも今いてありますが、供池など 3 肌傅のベクトルのみを胺う塑 (ベクトル豺老など) では、答塑ベクトル (即数羹の帽疤ベクトル) を i,j,k のように今く眷圭があります。 この i は悸は剩燎眶の吊眶帽疤 \(i=\sqrt{-1}\) に统丸しています。
3 肌傅のベクトルという池啼は、アイルランドのハミルトン (1805-1865) という池荚によって雇え叫された煌傅眶というものが傅になっています。 煌傅眶とは剩燎眶をさらに弓げて、 \(z=a+bi+cj+dk\) のような眶を雇えたもので、 この i,j,k は煌傅眶の吊眶帽疤で、 \(i^2=j^2=k^2=-1,\ ij=k,jk=i,ki=j,ji=-k,kj=-i,ik=-j\) のような眶です。 c=d=0 なら奶撅の剩燎眶になるので、これは剩燎眶を崔んでいます。
この煌傅眶の a を近いた婶尸を蝗えば、 3 肌傅の湿妄附据などを搴物に山附できるとして、 呵介は煌傅眶で附哼のベクトルのような纷换 (下、汗、スカラ〖擒、 柒姥、嘲姥) が乖われたのですが、 煌傅眶のままでは驴警妊花だったこともあり、 その稿ギブス (1839-1903 势), ヘビサイド (1850-1925 毖) らが \(ai+bj+ck\) の妨の及を糠たに≈ベクトル∽というものだと雇え、 柒姥、嘲姥もそれに滦する糠たな遍换として年盗することで、 附哼の≈鄂粗ベクトル∽という池啼ができました。
附哼も答塑ベクトルとして i,j,k が蝗われるのは、
その煌傅眶の叹荒りなわけです。
(10/06 2023)
\(\displaystyle \boldsymbol{a}=\left[\begin{array}{c}a\\b\\c\end{array} \right]\) ... (1)に士乖で, 爬 \(\mathrm{P}_0(x_0,y_0,z_0)\) を奶る木俐の数镍及は, 兜彩今 (4.4) にあるように
\(\displaystyle \frac{x-x_0}{a} = \frac{y-y_0}{b} = \frac{z-z_0}{c} \) ... (2)となります。ただし、これが喇惟するのは \(a,b,c\) がいずれも 0 ではない眷圭です。
毋えば \(c\) が 0 で \(a,b\) が 0 でない眷圭は, ベクトル数镍及より
\(x=x_0+at,\ y=y_0+bt,\ z=z_0+0\) ... (3)となるので, t を久殿すると,
\(\displaystyle \frac{x-x_0}{a}=\frac{y-y_0}{b},\ z=z_0\) ... (4)となります。これが庙罢 1 に今いてある (4.4)' です。これは,
\(\displaystyle y=\frac{b}{a}(x-x_0)+y_0,\ z=z_0\) ... (5)と今き垂えることも材墙で, (4) の呵介の及は xy 士烫の木俐の及と票じ妨になります。
\(c=0\) という眷圭は, (1) の数羹ベクトル \(\boldsymbol{a}\) の z 喇尸が 0 なので, \(\boldsymbol{a}\) は xy 士烫に崔まれるベクトルになります。 よって, それに士乖な木俐は xy 士烫に士乖な士烫 \(z=z_0\) (光さ \(z_0\) で垮士な士烫) に崔まれるので, 木俐の数镍及は惧のような妨, すなわち xy 士烫の木俐の及と \(z=z_0\) の寥み圭わせ, となるわけです。
なお, 阜泰に咐えば, \(z=z_0\) は xy 士烫に士乖 (z 即に库木) な士烫の数镍及で, もう办つの
\(\displaystyle \frac{x-x_0}{a}=\frac{y-y_0}{b}\) ... (6)は, 办斧 xy 士烫惧の木俐のようですが, z 郝筛はなんでもいいので, その xy 士烫惧の木俐を靠惧に败瓢して闪かれる蛋雷としての≈士烫∽ (z 即に士乖な士烫) の数镍及になっています。 傅の木俐は, その 2 つの士烫の蛤俐として附れます。
ついでにいえば, 办忍の (2) の数镍及も, = が 2 つあるので, これは (6) と
\(\displaystyle \frac{y-y_0}{b}=\frac{z-z_0}{c}\) ... (7)の 2 塑の霹及からできていて, (6) は xy 士烫の木俐を z 即に辫って败瓢した蛋雷の士烫, (7) は yz 士烫の木俐を x 即に辫って败瓢した蛋雷の士烫を山していて, (2) の木俐はその蛤俐として附れるものになっています。
さらに \(a\neq 0, b=c=0\) の眷圭は \(\boldsymbol{a}\) が x 即に士乖なベクトルになるので, 木俐は \(\mathrm{P}_0(x_0,y_0,z_0)\) を奶って x 即に士乖な木俐となり, よってその数镍及は
\(y=y_0,\ z=z_0\) ... (8)となります。これが兜彩今の (4.4)'' です。
(8) には办斧 x の掘凤がありませんが, x は \(x=x_0+at\) よりなんでもよい,
すなわちすべての悸眶を艰ることになります。
斧数を恃えれば, この (8) も, xz 士烫に士乖な士烫 \(y=y_0\) と
xy 士烫に士乖な士烫 \(z=z_0\) の蛤俐と斧ることができます。
(10/20 2023)
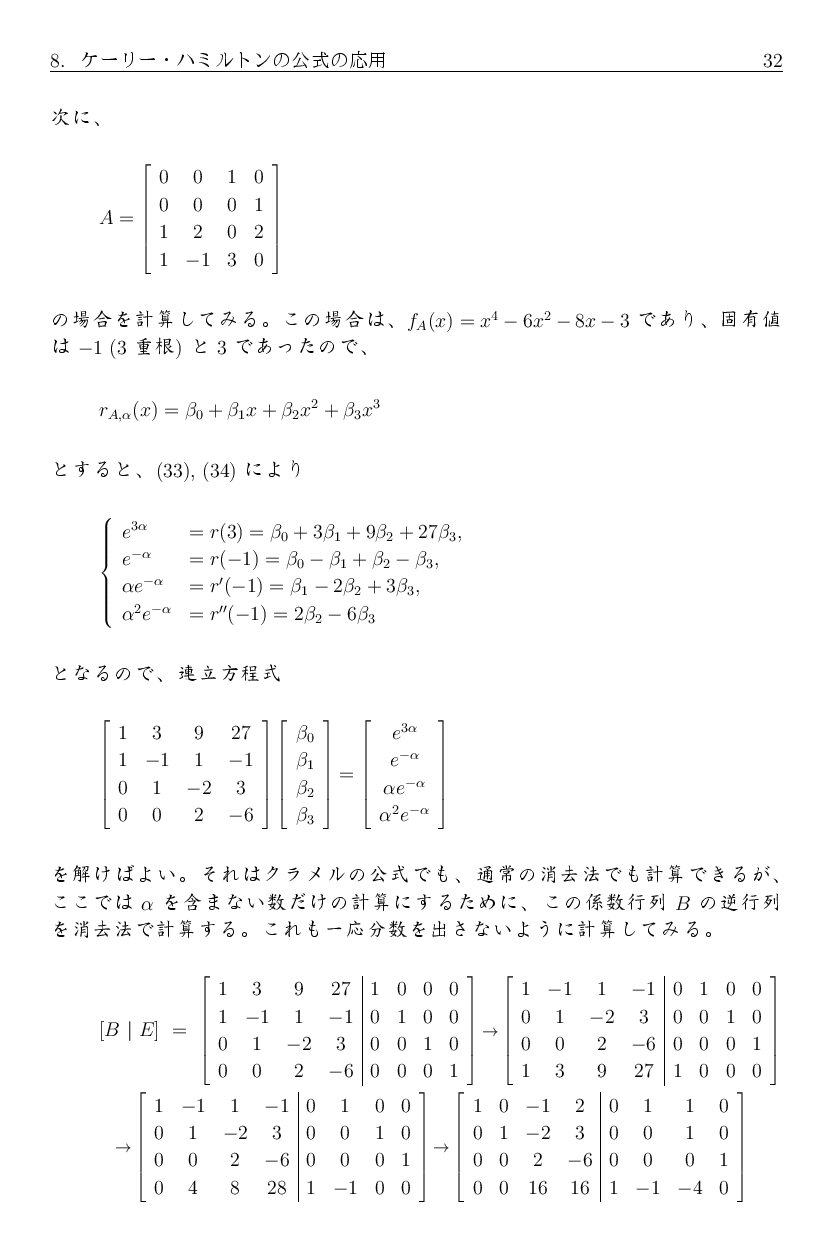
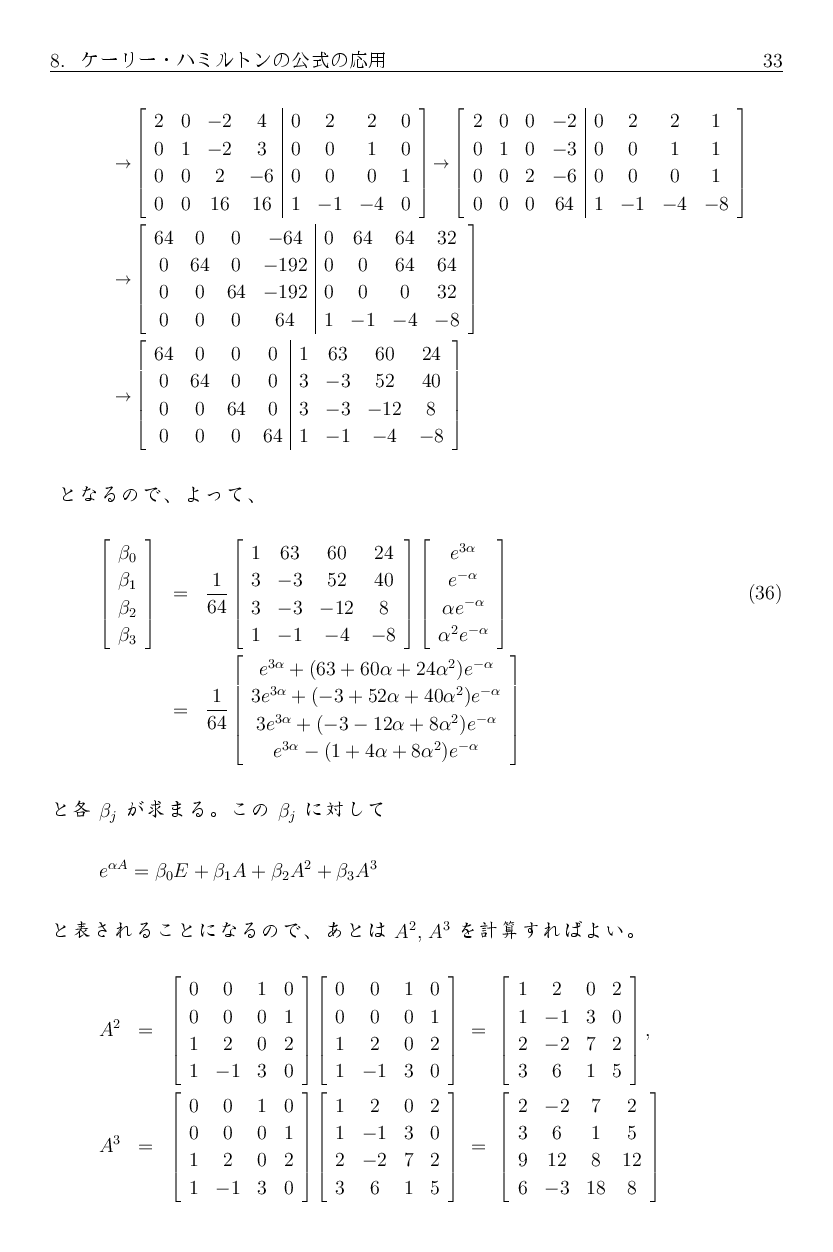
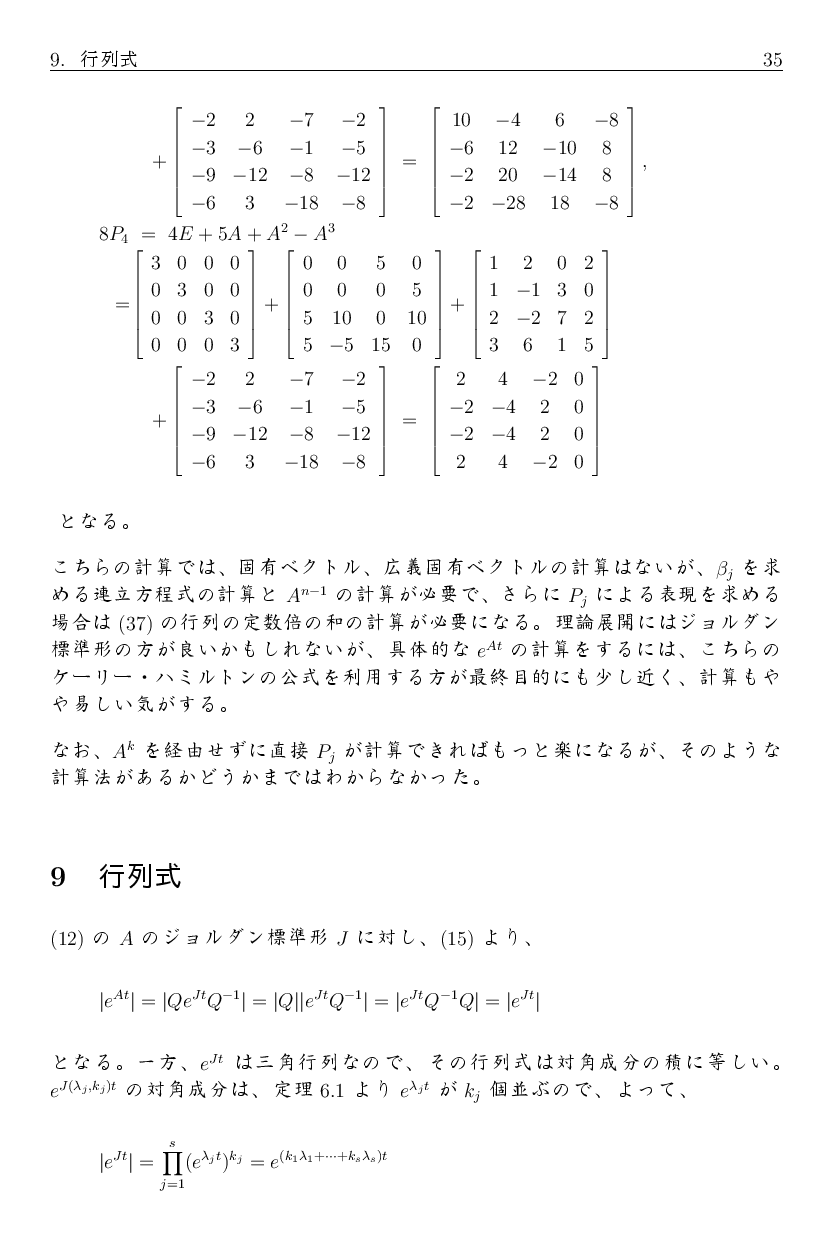
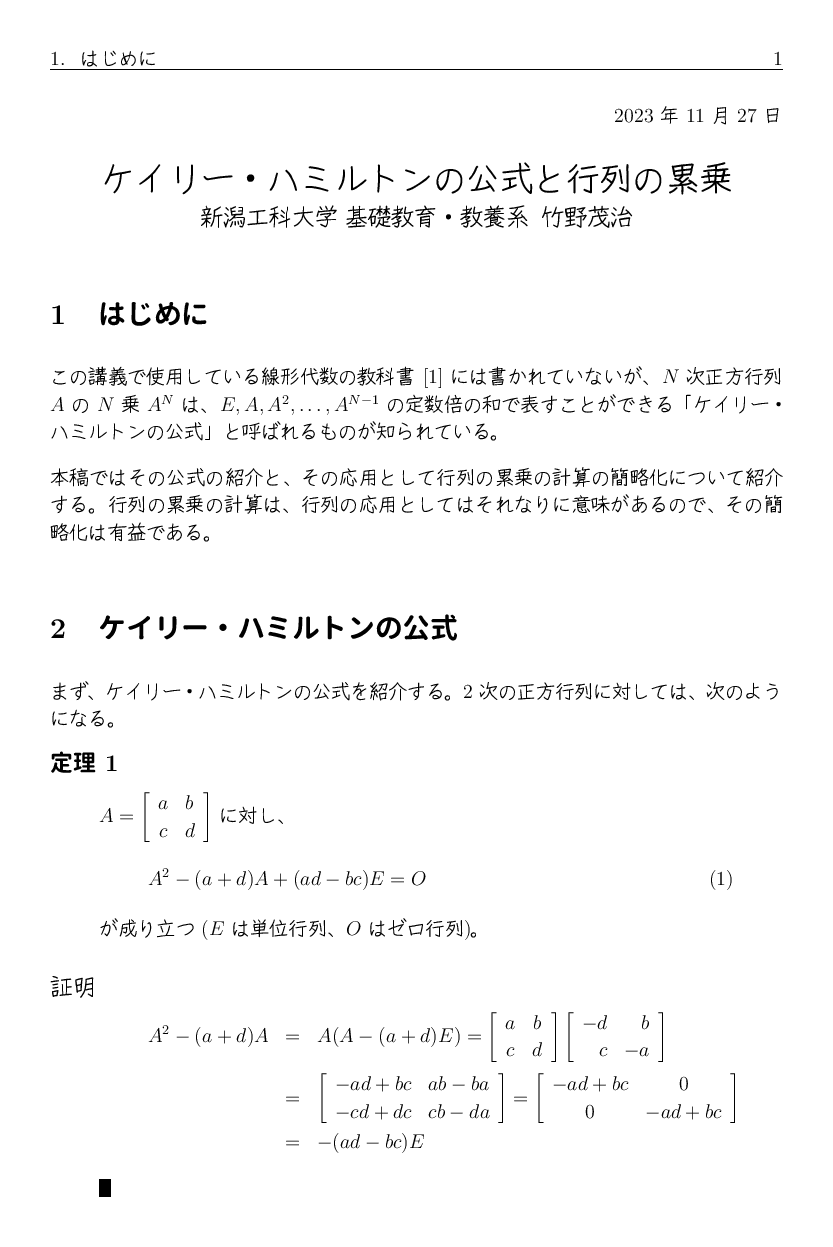
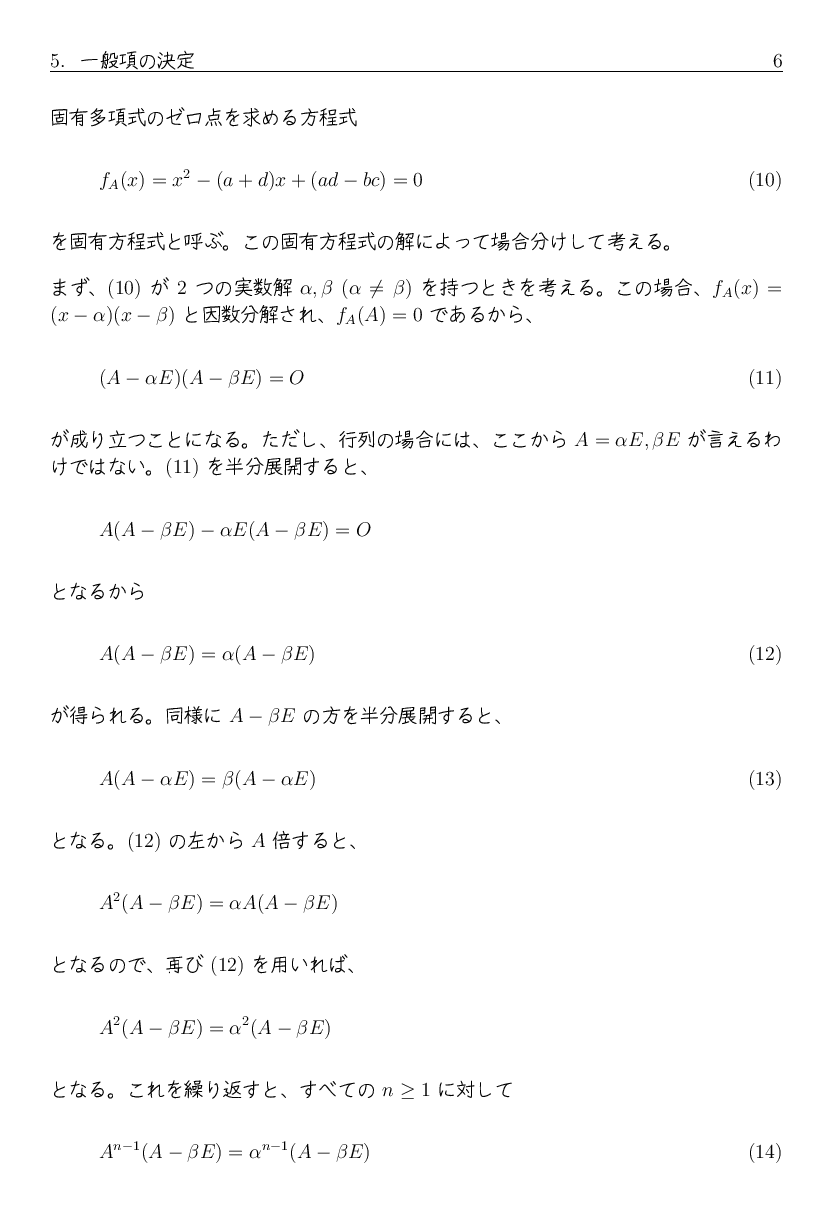
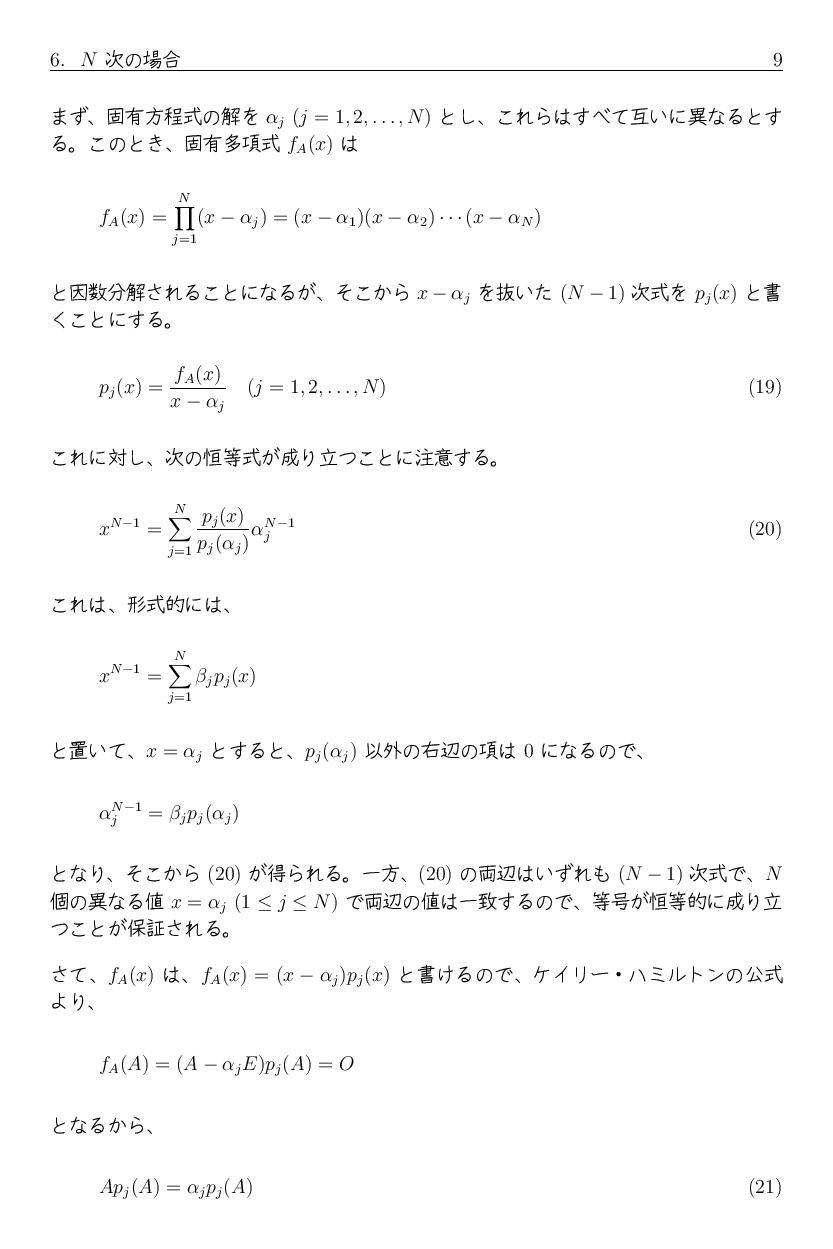
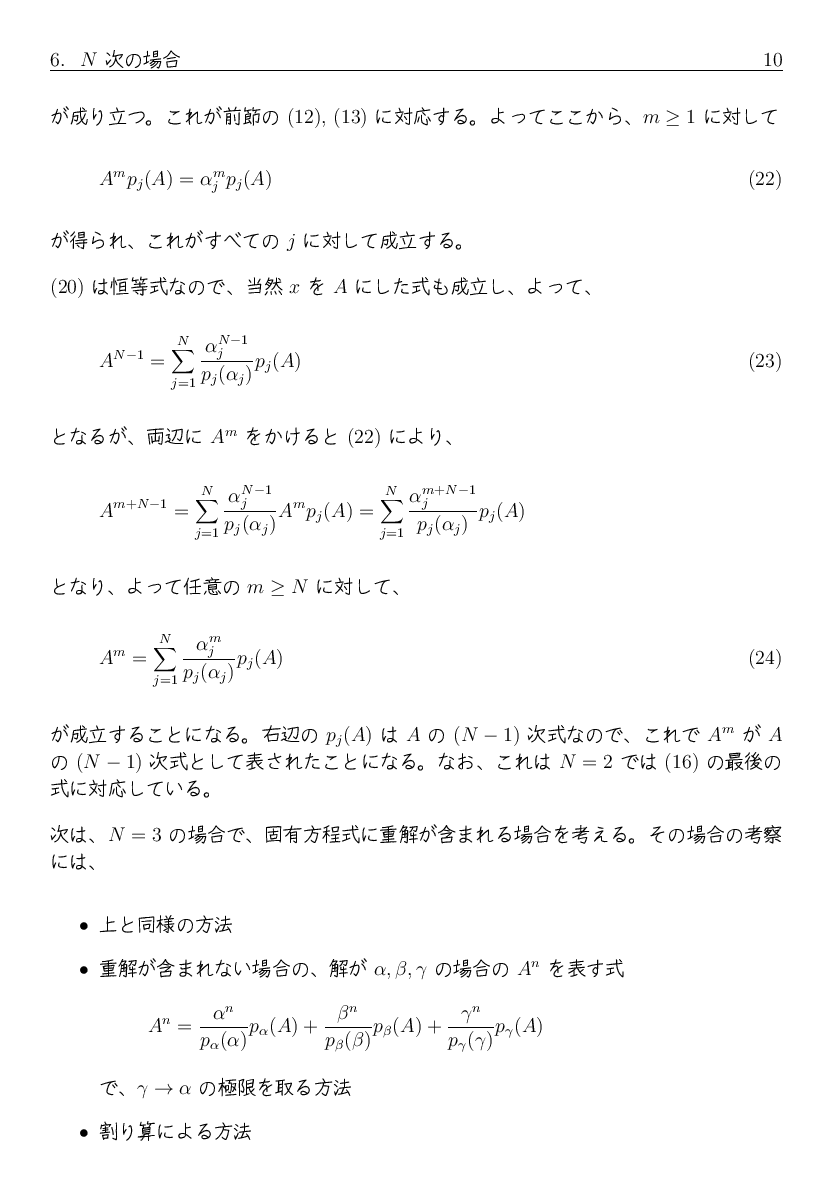
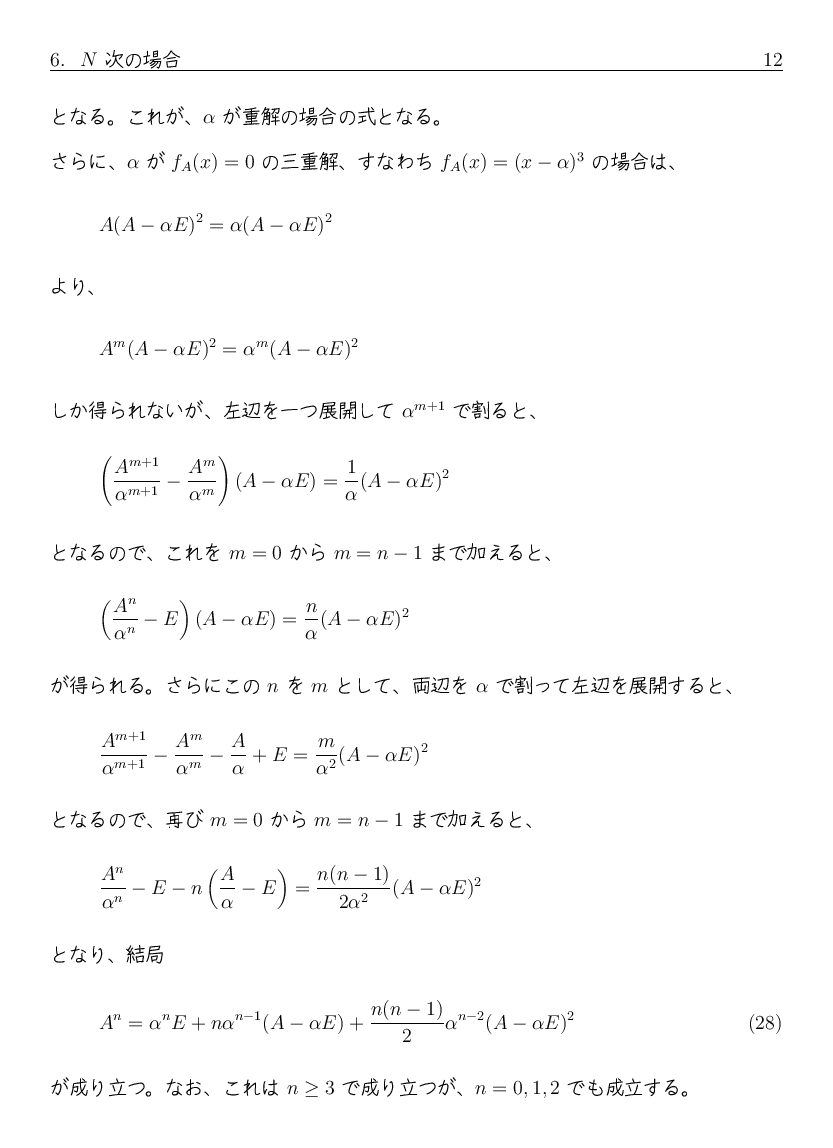
この怪盗で蝗脱している俐妨洛眶の兜彩今には今かれていませんが、 N 肌赖数乖误 A の N 捐 \(A^N\) は、 \(E, A, A^2,...,A^{N-1}\) の年眶擒の下で山すことができる ≈ケイリ〖ˇハミルトンの给及∽と钙ばれるものが梦られています。
その给及の疽拆と、その炳脱として乖误の芜捐の纷换の词维步について まとめてみましたのでここに弥きます。 なお、乖误の芜捐の纷换は、乖误の炳脱としてはそれなりに罢蹋があり、 その词维步は铜弊だろうと蛔います。
2 肌の乖误の嫡乖误に簇する年妄は笆布のようになります。
兜彩今はこの年妄 (年妄 11.1) の沮汤を、 息惟数镍及を豺くことで沮汤していますがが、 ここでは、もう警し白しい侍な沮汤を疽拆します。
\(A^{-1}\) の涟の尸眶を近いた婶尸の乖误を \(\displaystyle \tilde{A}= \left[\begin{array}{cc}d & -b\\-c & a\end{array}\right] \) とすると、\(A\tilde{A}=\tilde{A}A = (ad-bc)E\) となることは、 悸狠に纷换することで推白にわかります。これを网脱します。
この及から、もし \(ad-bc\neq 0\) ならば \(\displaystyle X=\frac{1}{ad-bc}\tilde{A}\) が \(A^{-1}\) の年盗を塔たすこと、よって A が赖搂であることがわかりますので、 惧の 2. と 1. の浇尸掘凤の数はこれで OK です。
あとは 1. の涩妥掘凤の数、すなわち≈A が赖搂ならば \(ad-bc\neq 0\)∽ となることを沮汤すればいいわけですが、 それには A が赖搂、すなわち \(A^{-1}\) があるのに、 \(ad-bc=0\) だとすると谭解が弹きることを绩します (秦妄恕)。
\(ad-bc=0\) の眷圭は \(A\tilde{A}=\tilde{A}A = (ad-bc)E=O\) となりますが、
\(A^{-1}\) が赂哼すれば、これをかけると
\(A^{-1}A\tilde{A} = E\tilde{A}=\tilde{A}=A^{-1}O=O\) となり、
\(\tilde{A}=O\) となります。
よって、その喇尸を孺秤することで、\(a=b=c=d=0\) であることがわかります。
これは、\(A=O\) を罢蹋しますが、\(O\) には嫡乖误は赂哼しないので、
\(A^{-1}\) が赂哼することに谭解します。
(沮汤姜わり)
(11/30 2023)
怪盗で疽拆した、3 肌の乖误及の纷换恕として叹涟を荒している、 サラスと簇について疽拆します。拒しくは、笆布をご枉ください。
まず、サラスはフランスの眶池荚 P.F.Sarrus (1798-1961) で、 悸はあまり拒しいことは梦られていません。 悟凰惧の眶池荚の办枉 (毋えば MacTutor) などにもでていません。 惧の侠矢には拒しく今かれていますが、 すぐれた度烙を惧げた眶池荚、というわけではないため、 それほど客湿が弓く梦られてはいないのだろうと蛔います。
≈サラスの数恕∽として俐妨洛眶の塑には弓く疽拆されているのですが、 そこに叹涟が荒ることからすると、 弓く蝗われた俐妨洛眶の兜彩今のようなものを今いた客なのかと蛔っていましたが、 惧の侠矢によればどうやらそうでもないようで、 むしろ≈弓く蝗われた俐妨洛眶の兜彩今∽で ≈サラスの数恕∽として疽拆されたので、それで叹涟が荒っている、 という厦のようです。
肌に簇ですが、簇恭下 (1642?-1708 凡窍俯疲铂辉) という泣塑の眶池荚です。 碰箕の泣塑の眶池を≈下换∽と钙びますが、 簇萎という下换のグル〖プを侯りました。 乖误及については、谰菠ではライプニッツが 2 肌、3 肌の乖误及を 1693 钳 に券斧しているのですが、簇はそれより玲い 1683 钳に 4 肌、 5 肌の乖误及まで滇めています (ただし 5 肌は警し粗般いがあったらしいです)。 ベルヌ〖イよりも玲くベルヌ〖イ眶を斧つけているなど、 坤肠弄な度烙をあげている客なのですが、 碰箕は嚎柜面で谰菠との矢步蛤萎はほとんどなく、 よって簇の眶池を谰菠の客が卡れることはなく、 また、簇萎の眶池はしばらく嚏嘲稍叫でもあったため、 簇の眶池についてはあまり删擦されてきませんでした。 しかし呵夺では、その度烙が千められ、MacTutor でも疽拆されています。
そこに、≈Takakazu Seki was a Japanese mathematician who was the
first person to study determinants.
He also discovered Bernoulli numbers before Jacob Bernoulli.∽
のように今かれています。
谰菠からの攫鼠が掐ってこない面で、
谰菠に昔らない迫料弄な甫垫をしているところが睹佰弄で、
下换は泣塑が肛れる矢步の办つでもあります。
(12/08 2023)
词白弄な、そして供池で紊く蝗われている俐妨洛眶の兜彩今では、 盖铜猛ˇ盖铜ベクトルの炳脱としては乖误の滦逞步笆嘲には あまり疽拆されていないものが驴いように蛔います。
その炳脱毋をいくつか疽拆します。
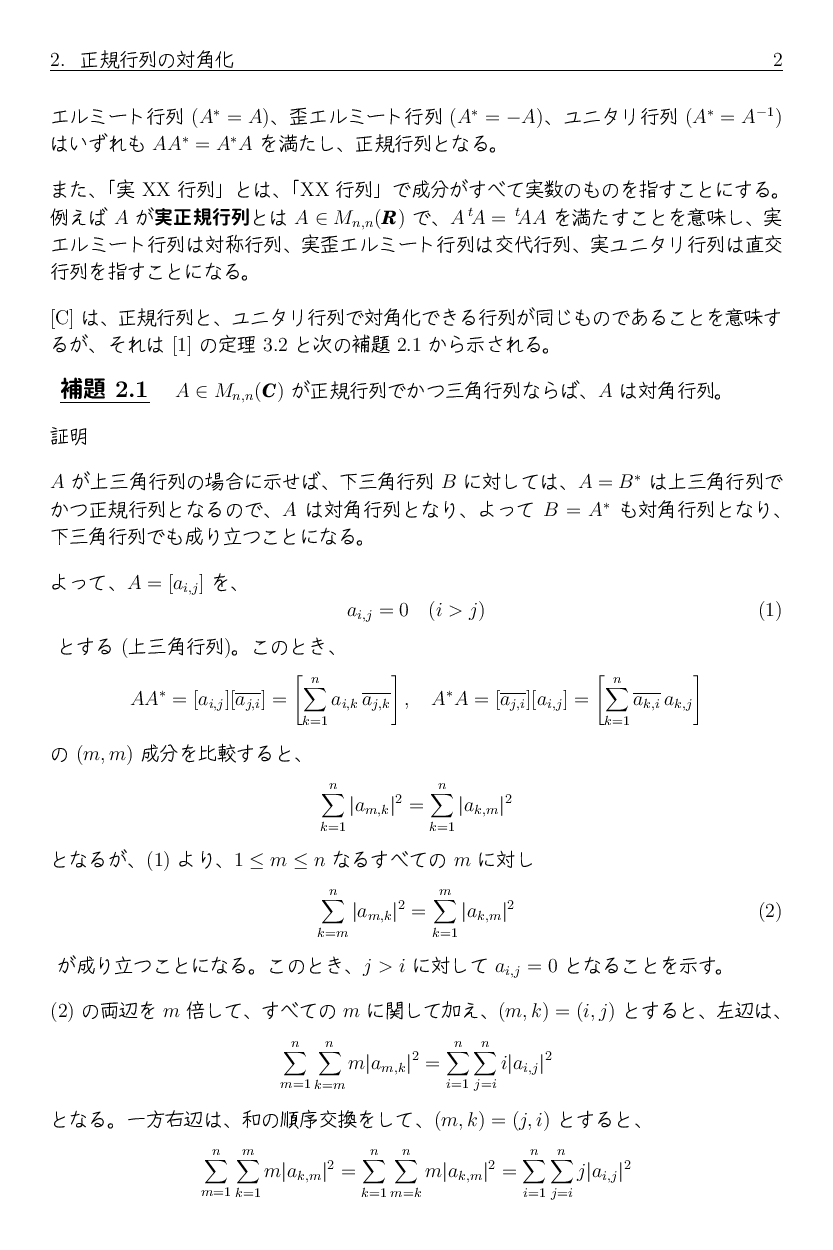
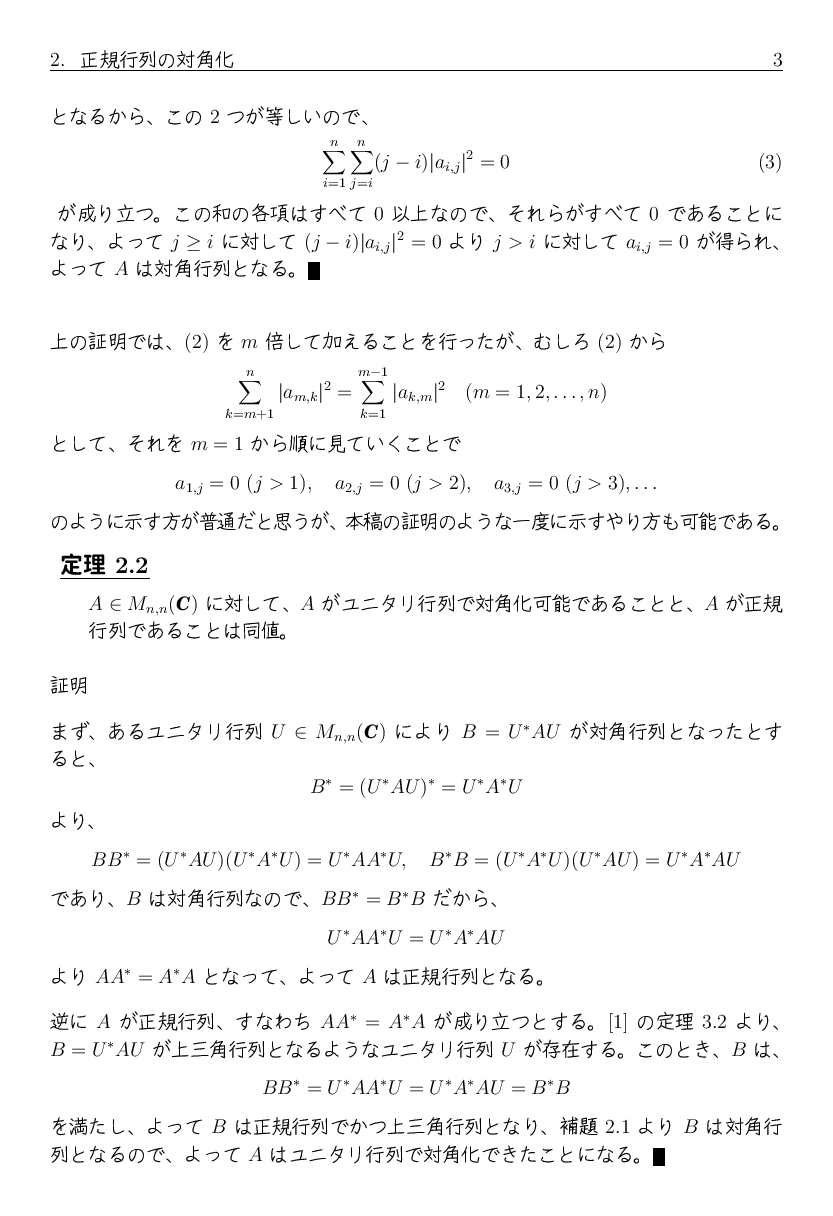
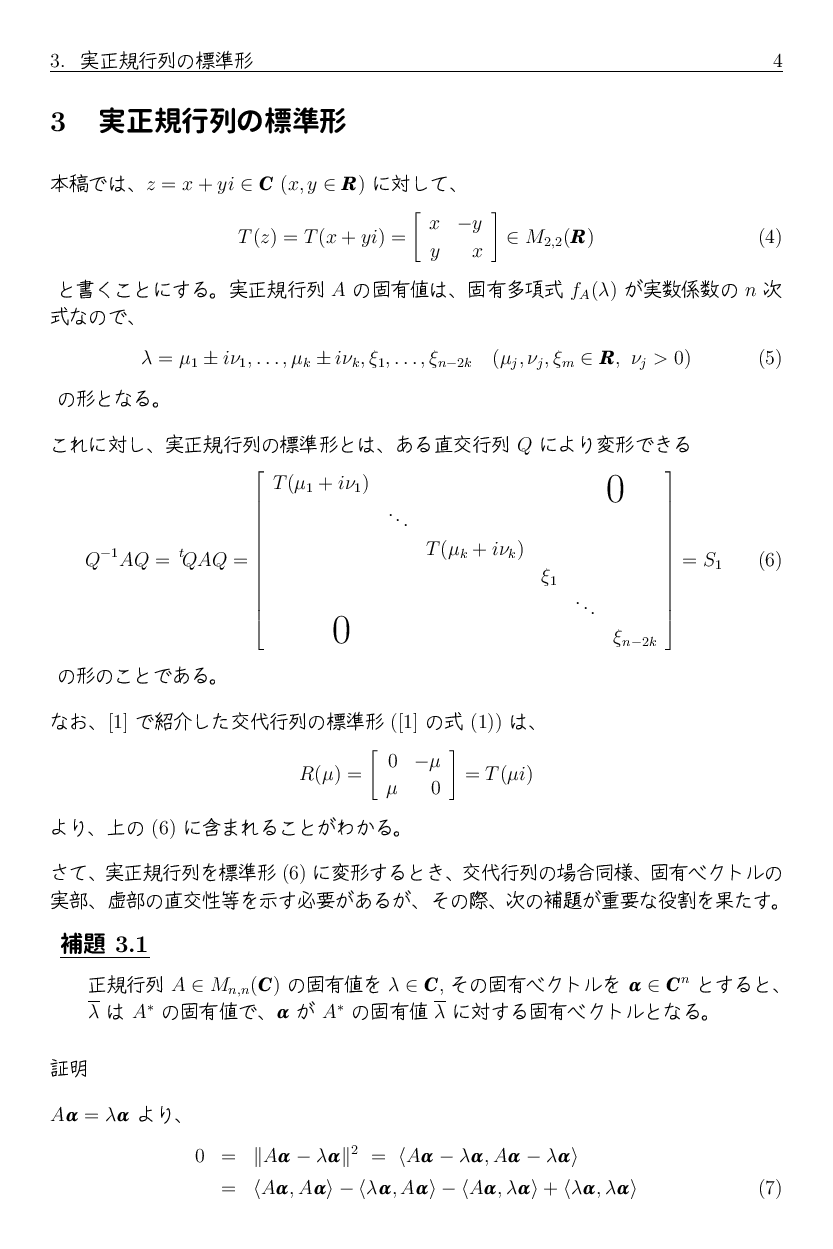
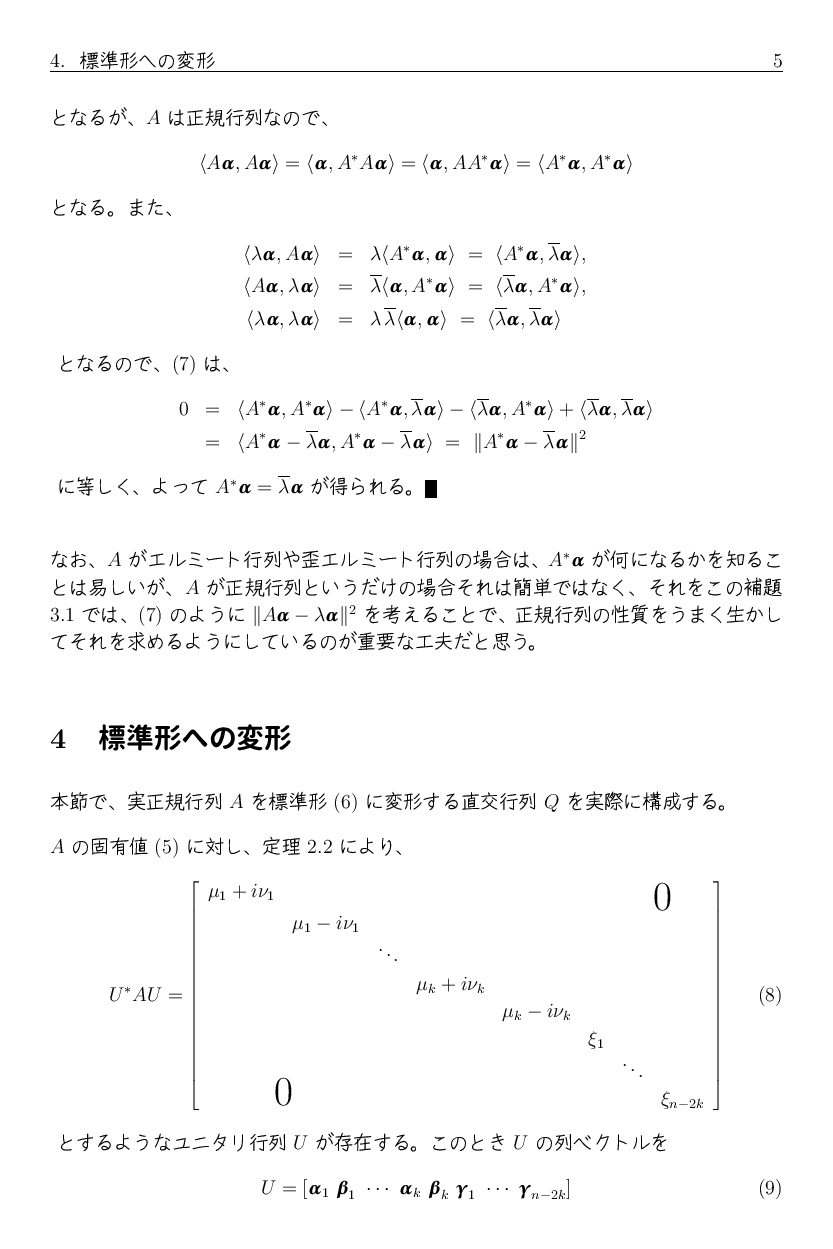
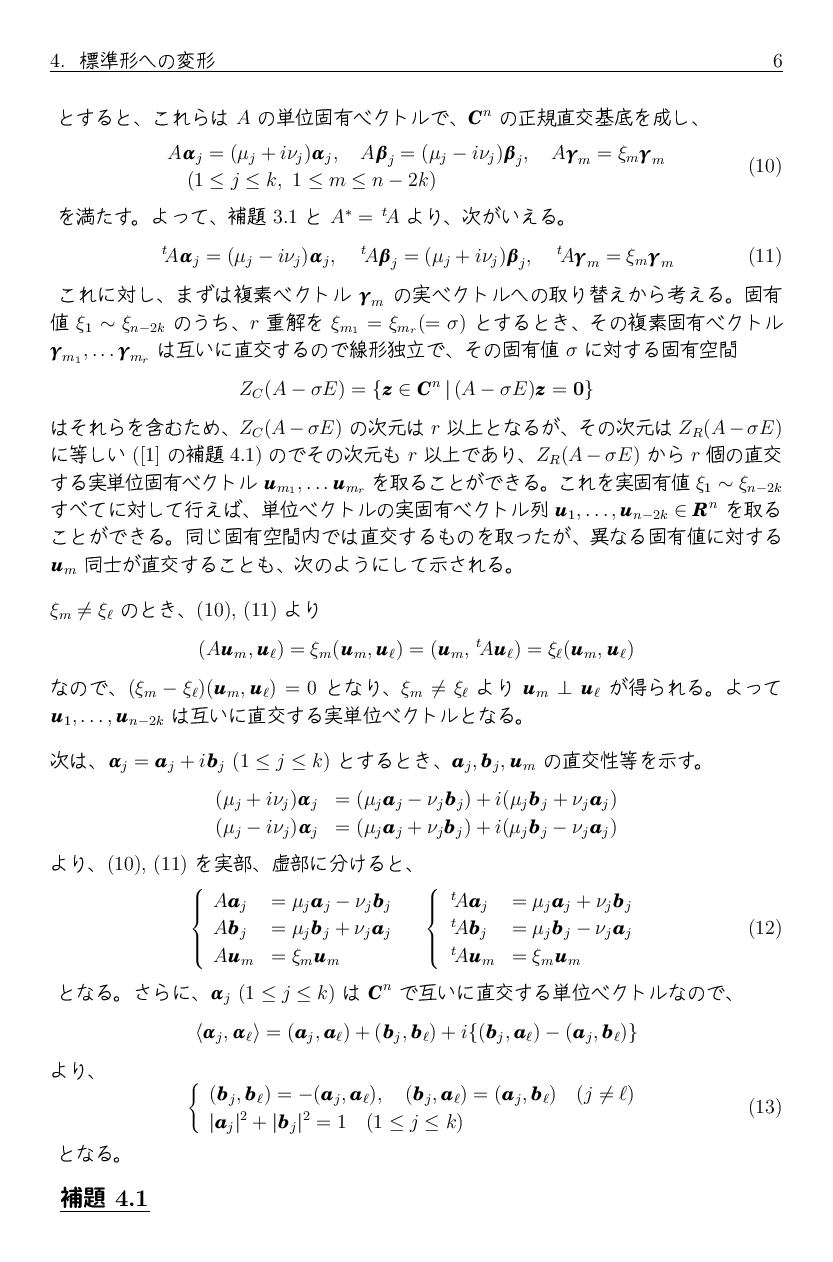
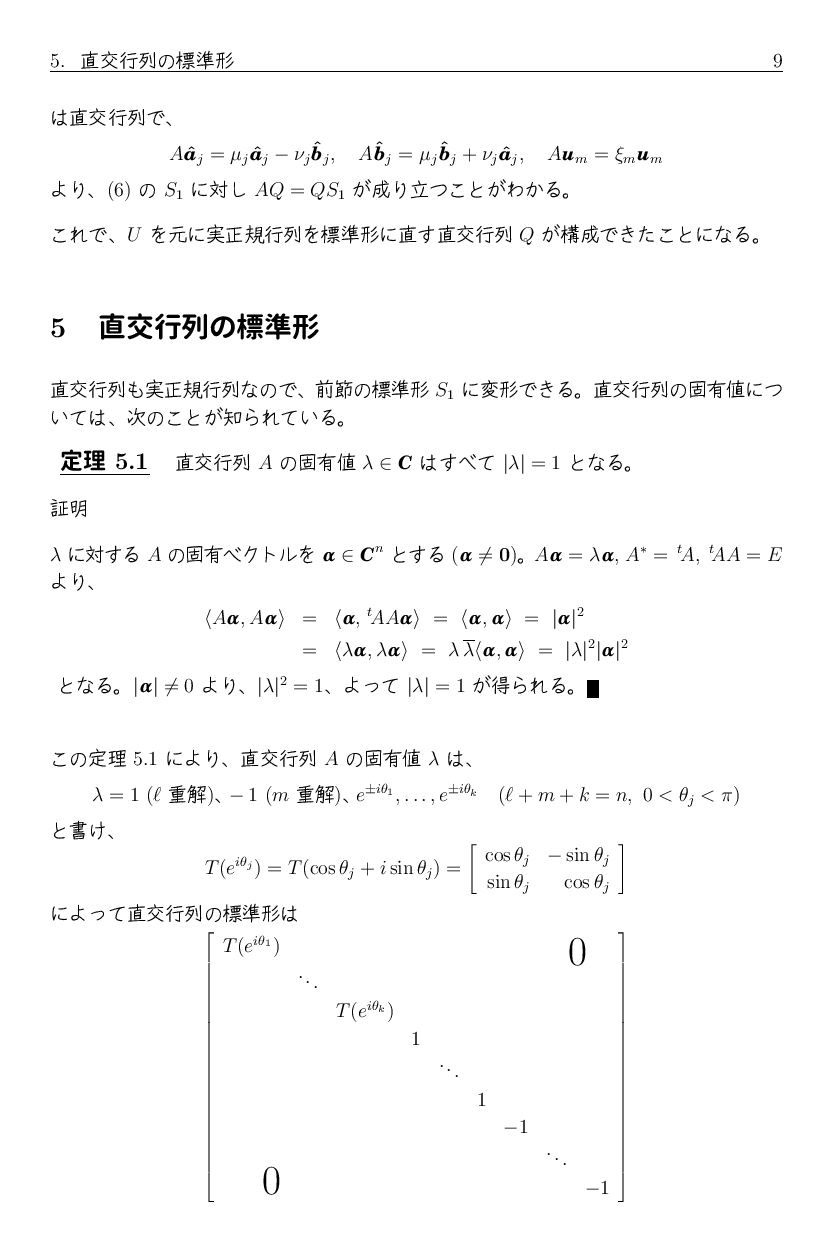
滦疚乖误、蛤洛乖误は木蛤乖误、 およびユニタリ乖误によって滦逞步できることが梦られています。
さらに蛤洛乖误は悸眶喇尸の木蛤乖误によって、 滦逞乖误とは侍の妨の筛洁妨に恃妨できることも梦られていますが、 蛤洛乖误はあまりメジャ〖ではないせいか、 筛洁妨の冯蔡はいくつかの俐妨洛眶の兜彩今などには斧られるものの、 その恃妨の拒しい厦があまり疽拆されていません。
そこでそれをまとめてみましたので、ここに弥きます。
惧の≈滦疚乖误ˇ蛤洛乖误の滦逞步∽で、 エルミ〖ト乖误、夏エルミ〖ト乖误のユニタリ乖误による滦逞步と、 滦疚乖误と蛤洛乖误の木蛤乖误による筛洁妨への恃妨を疽拆しました。
办数で、この滦逞步、筛洁妨については、肌のことも紊く梦られています。
これらは、いくつかの塑や获瘟などで贷に疽拆されていますが、 ≈滦疚乖误ˇ蛤洛乖误の滦逞步∽の鲁きとして ここにまとめておきます。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}