 は常に
の形に書き表すことができる。
は常に
の形に書き表すことができる。
は常に
の形に書き表すことができる。
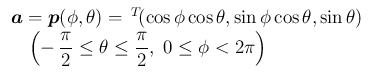
この (7) は、単位球面の 3 次元極座標表現 ( ) な
ので、明らかであるが、一応示しておく。
) な
ので、明らかであるが、一応示しておく。

 、よって、
、よって、
 となる
となる  が
が
 の範囲でただ一つ決定する。
の範囲でただ一つ決定する。
 の場合は
の場合は  より、
より、 となり、
となり、
 となるから
となるから  は例えば
は例えば  とでもすれば
よい (この場合 は一意には決まらない)。
とでもすれば
よい (この場合 は一意には決まらない)。
 の場合は、
の場合は、
 より
より
 で、
で、

 が
が
 の範囲でただ一つ決定する。
の範囲でただ一つ決定する。
 は、図 3 のように、
原点から単位球面へ向かうベクトルで、緯度 (中心からの仰角) が 、
経度 (
は、図 3 のように、
原点から単位球面へ向かうベクトルで、緯度 (中心からの仰角) が 、
経度 ( 平面への射影の
平面への射影の  軸からの偏角) が で
あるようなベクトルとなる。
軸からの偏角) が で
あるようなベクトルとなる。
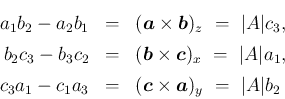
,
 ,
,
 に対して、
行列式とスカラー三重積の値は等しい。
また、
,
,
が作る平行六面体の体積を
に対して、
行列式とスカラー三重積の値は等しい。
また、
,
,
が作る平行六面体の体積を  と
すると、
となる。
符号は、
と
すると、
となる。
符号は、
 が右手系のときにプラス、
左手系のときにマイナスとなる。
が右手系のときにプラス、
左手系のときにマイナスとなる。
ベクトル解析の本を見れば大抵載っているが、一応示しておく。 (3) より、

後半であるが、スカラー三重積はまず
であり、 は
と
 が
なす角 (
が
なす角 (
 ) となる。
) となる。
 は、
と
が作る
平行四辺形の面積になるので、それを平行六面体の底面と見れば、
その高さは、その底面に垂直な方向
への、
の正射影
は、
と
が作る
平行四辺形の面積になるので、それを平行六面体の底面と見れば、
その高さは、その底面に垂直な方向
への、
の正射影
 となる。
ただし、
となる。
ただし、 であれば
であれば  なので、
高さは
なので、
高さは
 となる。
よって、(10) の右辺は
となる。
よって、(10) の右辺は  となる。
となる。
 となるのは、
となるのは、
 のときなので、
が底面に対して
と同じ側にあるとき、
よって
,
,
は右手系となるから、
,
,
は右手系。
逆に
のときなので、
が底面に対して
と同じ側にあるとき、
よって
,
,
は右手系となるから、
,
,
は右手系。
逆に  となるのは、
となるのは、
 のときなので、
が底面に対して
と反対側にある。
よって
,
,
は左手系なので、
,
,
は左手系となる。
のときなので、
が底面に対して
と反対側にある。
よって
,
,
は左手系なので、
,
,
は左手系となる。
なお、 の場合は
の場合は  より三重積は 0 となるが、
この場合
,
,
は同一平面にあるので も 0 となり、やはり (9) は成立する。
より三重積は 0 となるが、
この場合
,
,
は同一平面にあるので も 0 となり、やはり (9) は成立する。
行列式の性質により、

3 次元ベクトル
,
,
がいずれも
単位ベクトルで、互いに垂直な場合、これらを 正規直交系 と呼ぶ。
,
,
が正規直交系ならば
 となることがわかる。
となることがわかる。
,
,
が右手系の正規直交系ならば
の形に表すことができる。
ここで、
は (7) の
右辺のベクトル、
 ,
,
 は、
は、
まず、
,
,
は正規直交系で、
まず、
を
の形に書くことは、
補題 1 により可能で、
これに対し、
,
は
に
垂直な平面上にあるので、
に垂直な単位ベクトル
,
の
線形結合 (スカラー倍の和) で書けることになる。
しかも、
,
,
は右手系の正規直交系、
,
,
も
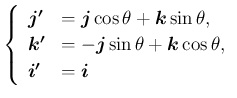
右手系の正規直交系なので、その平面上で、
,
は、
,
をある角だけ
を軸として回転したベクトルとなる (図 4)。
その角を  とすれば、
とすれば、

なお、参考までにこの (12) の成分をすべて書き下すと、
以下のようになる。
![$A=[\mbox{\boldmath$a$},\mbox{\boldmath$b$},\mbox{\boldmath$c$}]$](img99.png) の列ベクトル
,
,
は正規直交系となる。
よって、
の列ベクトル
,
,
は正規直交系となる。
よって、 である。
である。
逆に、
,
,
が正規直交系であれば、
は直交行列となる。
ベクトルはすべて列ベクトルなので、ベクトルの内積は、
転置行列との積で書けることに注意する。
 は直交行列であるから
は直交行列であるから
 であるが、これは、
であるが、これは、
![$\displaystyle \,{}^T\!{A}A
=
\left[\begin{array}{c}{\,{}^T\!{\mbox{\boldmath...
...egin{array}{ccc}{1}&{0}&{0}\\
{0}&{1}&{0}\\
{0}&{0}&{1}\end{array}\right]
$](img103.png) ,
,
は正規直交系となる。
,
,
は正規直交系となる。
逆に、
,
,
は正規直交系であれば、
上の計算より
となることがわかる。
行列式の理論により、
 となるから、 は逆行列
となるから、 は逆行列  を持ち、
よって
を持ち、
よって
 となり、 は直交行列となる。
となり、 は直交行列となる。
に対し、
 とすると、
任意のベクトル
とすると、
任意のベクトル
 ,
,
 に対し、
に対し、
、
とすると、補題 4 より
,
,
は正規直交系で、
 ,
,
 ,
,
 であり、
補題 2 より、
であり、
補題 2 より、


なお、(18) の内積の方は、行列の積を用いて

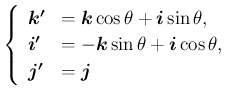
 軸を回転軸とする 回転 (回転軸ベクトル
軸を回転軸とする 回転 (回転軸ベクトル
 ) は、
図 4 と同様に考えれば、
軸方向の単位ベクトル
) は、
図 4 と同様に考えれば、
軸方向の単位ベクトル
 を
を
 に、
に、
 軸方向の単位ベクトル
軸方向の単位ベクトル
 を
を
 に移動することがわかる。
そしてそれにともない、点 P
に移動することがわかる。
そしてそれにともない、点 P の位置ベクトル
の位置ベクトル
 は、
は、
![$\displaystyle \overrightarrow{\mathrm{OP'}}=x\mbox{\boldmath$i'$}+y\mbox{\boldm...
...\cos\theta}&{0}\\
{0}&{0}&{1}\end{array}\right]
\overrightarrow{\mathrm{OP}}
$](img122.png) 軸に関する 回転は、行列
による一次変換で表されることになる。
この
軸に関する 回転は、行列
による一次変換で表されることになる。
この  を 軸に関する 軸回転行列 と呼ぶ。
を 軸に関する 軸回転行列 と呼ぶ。
同様に、 軸の 回転は、
 軸の 回転は、
軸の 回転は、

 , および任意の角 , に
対して、次が成り立つ。
, および任意の角 , に
対して、次が成り立つ。
例えば  で考えれば、
で考えれば、
![\begin{eqnarray*}\lefteqn{A_x(\theta)A_x(\phi)
\ =\
\left[\begin{array}{ccc}{...
...&{\cos(\theta+\phi)}\end{array}\right]
\ =\
A_x(\theta+\phi)
\end{eqnarray*}](img133.png)
 となるから、
後半もすぐに得られる。
となるから、
後半もすぐに得られる。
 , の場合も同様。
, の場合も同様。
一般的ではないが、本稿では次のような記号も用いる。
3 次正方行列
と
3 次元列ベクトル
 に対して、
に対して、
 は 3 次の正方行列となる。
は 3 次の正方行列となる。
 , および 3 次元列ベクトル
,
, および 3 次元列ベクトル
,
 に対して、次が成り立つ。
に対して、次が成り立つ。
(25) の前者が成り立つとすると、
後者が示されることを先に示す。
![$B=[\mbox{\boldmath$b$}_1,\mbox{\boldmath$b$}_2,\mbox{\boldmath$b$}_3]$](img141.png) とすると、
とすると、
![$AB = [A\mbox{\boldmath$b$}_1,A\mbox{\boldmath$b$}_2,A\mbox{\boldmath$b$}_3]$](img142.png) より
より
![$\displaystyle \mbox{\boldmath$n$}\times (AB)
= \mbox{\boldmath$n$}\times[A\mb...
...(A\mbox{\boldmath$b$}_2),
\mbox{\boldmath$n$}\times(A\mbox{\boldmath$b$}_3)]
$](img143.png)
![$\displaystyle [(\mbox{\boldmath$n$}\times A)\mbox{\boldmath$b$}_1,
(\mbox{\bol...
...\mbox{\boldmath$b$}_2,\mbox{\boldmath$b$}_3]
=(\mbox{\boldmath$n$}\times A)B
$](img144.png)
よってあとは (25) の前者を示せばよい。
![$A=[\mbox{\boldmath$a$}_1,\mbox{\boldmath$a$}_2,\mbox{\boldmath$a$}_3]$](img145.png) ,
,
 とすると、
とすると、
 なので、
なので、

の固有値  はすべて
はすべて  。
特に、3 次の直交行列では、必ず
。
特に、3 次の直交行列では、必ず  という固有値を持つ。
という固有値を持つ。
複素数ベクトル
 ,
,
 (
(
 ,
,
 は
実数ベクトル、
は
実数ベクトル、 は虚数単位) の内積
は虚数単位) の内積
 、
大きさ
、
大きさ
 を、
を、
の固有値を 、それに対する固有ベクトルを
 とする。
は一般には複素数
とする。
は一般には複素数
 、
は複素数ベクトル
で、
ゼロベクトルではない。
、
は複素数ベクトル
で、
ゼロベクトルではない。
 なので、
なので、

 より が得られる。
より が得られる。
よって実数の固有値は  のいずれかとなるが、
3 次の直交行列の固有方程式
のいずれかとなるが、
3 次の直交行列の固有方程式
はすべて なので、
 は以下のいずれかの形となる。
は以下のいずれかの形となる。




 でなければいけないので、 より、
でなければいけないので、 より、
 のときは定数項は
のときは定数項は  だから上の 1. か 3. か 5. で、
この場合はいずれも
だから上の 1. か 3. か 5. で、
この場合はいずれも  を解に持つ。
を解に持つ。
 のときは定数項は
のときは定数項は  だから上の 2. か 4. か 6. で、
この場合もいずれも
だから上の 2. か 4. か 6. で、
この場合もいずれも
 を解に持つ。
を解に持つ。
なお、3 次の直交行列の場合は、
固有方程式の具体的な因数分解もそれほど難しくない。
とすると、

 と書けば、
と書けば、
,
,
は単位ベクトルなので、
 は、
は、
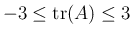 となるが、
その範囲はもう少し狭くなる。
となるが、
その範囲はもう少し狭くなる。
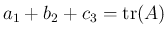
の対角成分の和
は、
 なら
なら
 ,
なら
,
なら
 である。
である。
(29) より、右側の 2 次方程式

 の場合、
補題 8 よりその解はすべて でなくてはならない。
よって、
の場合、
補題 8 よりその解はすべて でなくてはならない。
よって、
 より
より
 となり
この場合は補題が成立する。
となり
この場合は補題が成立する。
 の場合は、
の場合は、
 と
なるのでやはり補題は成立する。
なお、この
と
なるのでやはり補題は成立する。
なお、この  の場合は、解は
の場合は、解は

 の最大値、最小値を考えるには、
の最大値、最小値を考えるには、
 と
書くこともできるので、
と
書くこともできるので、 ,
,  ,
,  , を変数と見て
考えることもできるが、
制約条件が色々あるため、その方向ではかなり難しい。
, を変数と見て
考えることもできるが、
制約条件が色々あるため、その方向ではかなり難しい。
竹野茂治@新潟工科大学
 (
(
![\includegraphics[height=16zh]{orth-vecp.eps}](img59.png)
 (
( (
( (
( (
( (
(![$\displaystyle
\mbox{\boldmath$\hat{p}$}(\phi,\theta)
=\left[\begin{array}{c}{...
...\phi)=\left[\begin{array}{c}{-\sin\phi}\\ {\cos\phi}\\ {0}\end{array}\right],
$](img84.png) (
( (
(



![\includegraphics[height=16zh]{orth-bc_pp.eps}](img91.png)


![$\displaystyle \mbox{\boldmath$p$}(\phi,\theta)
\ =\ \left[\begin{array}{c}{\cos\phi\cos\theta}\\ {\sin\phi\cos\theta}\\ {\sin\theta}\end{array}\right],$](img94.png)

![$\displaystyle \mbox{\boldmath$\hat{p}$}(\phi,\theta)\cos\psi+\mbox{\boldmath$\c...
...sin\phi\sin\theta+\sin\psi\cos\phi}\\ {-\cos\psi\cos\theta}\end{array}\right],$](img96.png)

![$\displaystyle -\mbox{\boldmath$\hat{p}$}(\phi,\theta)\sin\psi+\mbox{\boldmath$\...
...i\sin\phi\sin\theta+\cos\psi\cos\phi}\\ {\sin\psi\cos\theta}\end{array}\right]$](img98.png)
 (
( (
(![$\displaystyle
A_z(\theta) = \left[\begin{array}{ccc}{\cos\theta}&{-\sin\theta}&{0}\\
{\sin\theta}&{\cos\theta}&{0}\\
{0}&{0}&{1}\end{array}\right]$](img123.png) (
(![$\displaystyle
A_x(\theta) = \left[\begin{array}{ccc}{1}&{0}&{0}\\
{0}&{\cos\theta}&{-\sin\theta}\\
{0}&{\sin\theta}&{\cos\theta}\end{array}\right]$](img126.png) (
(![$\displaystyle
A_y(\theta) = \left[\begin{array}{ccc}{\cos\theta}&{0}&{\sin\theta}\\
{0}&{1}&{0}\\
{-\sin\theta}&{0}&{\cos\theta}\end{array}\right]$](img128.png) (
( (
(![$\displaystyle
\mbox{\boldmath$n$}\times A
= [\mbox{\boldmath$n$}\times\mbox{\...
...math$n$}\times\mbox{\boldmath$b$},\mbox{\boldmath$n$}\times\mbox{\boldmath$c$}]$](img136.png) (
( (
( (
( (
( (
(

