 (16)
(16)
 階
微分方程式
の形に帰着させることもできる。
階
微分方程式
の形に帰着させることもできる。
例えば、(16) は、 (
( : 未知) とすれば、
: 未知) とすれば、
 より
より
 ,
,  と
すれば
の 1 階連立となる。
逆に、(17) から
と
すれば
の 1 階連立となる。
逆に、(17) から  (または
(または  ) を
消去して の 4 階微分方程式を作ることもできる。
それには、演算子法を利用すると便利だが、その詳しい説明は
微分方程式の本を参照してもらうことにして、
その計算だけを紹介する。
(17) は微分演算子
) を
消去して の 4 階微分方程式を作ることもできる。
それには、演算子法を利用すると便利だが、その詳しい説明は
微分方程式の本を参照してもらうことにして、
その計算だけを紹介する。
(17) は微分演算子  を用いて
を用いて
 を消去すれば、
を消去すれば、


よって、1 階連立方程式 (18) を
解くことと 階単独方程式 (19) を解くことは
実質的に同じで、
微分方程式の本では通常どちらかの解法のみを紹介し、
他方の方程式はそちらに変換する方法を紹介する、というのが普通である。
一般的には、より解法を重視する工学系の教科書では
単独方程式 (19) の方で解法を紹介し、
理論を重視する理学系の教科書では
連立方程式 (18) の方で解法を紹介することが
多いように思う。
それは、連立方程式 (18) の解法には行列の理論、
特に  の話が必要になるからだと思われる。
単独方程式 (19) の場合は、
行列を使用せずに特性方程式 (連立方程式 (18) の
場合の固有方程式に対応する) を解くことで、代入法や定数変化法、演算子法、
ラプラス変換などにより行列を用いずに解を求めることができる。
の話が必要になるからだと思われる。
単独方程式 (19) の場合は、
行列を使用せずに特性方程式 (連立方程式 (18) の
場合の固有方程式に対応する) を解くことで、代入法や定数変化法、演算子法、
ラプラス変換などにより行列を用いずに解を求めることができる。
なお、(18) や (19) の
係数  が定数でない場合、すなわち
が定数でない場合、すなわち  の既知関数である場合は、
方程式の解法は特殊な場合にしか存在せず、問題はかなり難しい。
本節では定数係数の場合のみ扱う。
の既知関数である場合は、
方程式の解法は特殊な場合にしか存在せず、問題はかなり難しい。
本節では定数係数の場合のみ扱う。
方程式に現れる既知関数  がすべて 0 である場合の方程式を斉次形、
一つでも 0 でないものがある場合は非斉次形と呼ぶ。
がすべて 0 である場合の方程式を斉次形、
一つでも 0 でないものがある場合は非斉次形と呼ぶ。
![$\displaystyle Y(t) = \left[\begin{array}{c}{y_1(t)}\\ {y_2(t)}\\ \vdots\\ {y_n(...
...{f_2(t)}\\ \vdots\\ {f_n(t)}
\end{array}\right],
\hspace{1zw}A=[a_{ij}]_{i,j}
$](img261.png)
![$\displaystyle Y(t_0)=Y_0=\left[\begin{array}{c}{\alpha_1}\\ {\alpha_2}\\ \vdots\\ {\alpha_n}
\end{array}\right]
$](img263.png)
 ) を満たす解を考える。
) を満たす解を考える。
 の斉次方程式の場合、
の斉次方程式の場合、 の初期値問題の解は、
一意的に
の初期値問題の解は、
一意的に
 の両辺に
の両辺に  を左からかけると、
定理 5.3 により、
を左からかけると、
定理 5.3 により、

 となるので
となるので  は
定数行列であることになる。よって
は
定数行列であることになる。よって
 となるので、
両辺に をかければ (24) が得られる。
となるので、
両辺に をかければ (24) が得られる。
より一般の非斉次方程式の場合は、
 に関して
に関して  から まで両辺を積分すると
から まで両辺を積分すると
 倍して移項すれば、
が得られる。
いずれも、 の計算によって解がシンプルな形で表現されることになる。
倍して移項すれば、
が得られる。
いずれも、 の計算によって解がシンプルな形で表現されることになる。
さて、これらを用いて、実際に (20) の 初期値問題
および (21) の初期値問題 の解を求めてみる。(20) は、
![$\displaystyle \left[\begin{array}{c}y\\ z\end{array}\right]'
= \left[\begin{ar...
...\cos t\end{array}\right]
= A\left[\begin{array}{c}y\\ z\end{array}\right]+F(t)
$](img279.png)
 の固有値は、
の固有値は、
 ,
,  、固有ベクトルは
、固有ベクトルは
![$\displaystyle \mbox{\boldmath$x$}_1=\left[\begin{array}{c}1\\ \lambda_1\end{arr...
...1\\ \lambda_2\end{array}\right]=\left[\begin{array}{c}1\\ 2i\end{array}\right]
$](img284.png) は対角化可能で、
は対角化可能で、
![$\displaystyle Q=[\mbox{\boldmath$x$}_1\ \mbox{\boldmath$x$}_2] = \left[\begin{a...
...ay}\right]
=\frac{1}{4}\left[\begin{array}{cc}2 & i\\ 2 & -i\end{array}\right]
$](img285.png)
![$\displaystyle Q^{-1}AQ
= \left[\begin{array}{cc}\lambda_1&0\\ 0&\lambda_2\end{...
...Q^{-1}e^{At}Q =\left[\begin{array}{cc}e^{-2it}&0\\ 0&e^{2it}\end{array}\right]
$](img286.png)
![$\displaystyle e^{At}\left[\begin{array}{c}y_0\\ z_0\end{array}\right]
=
\left...
...array}{c}y_0\cos 2t+(z_0/2)\sin 2t\\ -2y_0\sin 2t+z_0\cos 2t\end{array}\right]
$](img292.png)
![\begin{eqnarray*}\lefteqn{\int_0^te^{A(t-s)}\left[\begin{array}{c}0\\ \cos s\end...
...n{array}{c}\cos 3t+3\cos t-4\\ 2\sin 3t+6\sin t\end{array}\right]\end{eqnarray*}](img293.png)
![${}^T\!{[\alpha\ \beta]}/12$](img294.png) とし、
とし、
 ,
,  と略して書くと、
と略して書くと、
![$\displaystyle \int_0^te^{A(t-s)}\left[\begin{array}{c}0\\ \cos s\end{array}\rig...
...1}{3}\left[\begin{array}{c}\cos t-\cos 2t\\ -\sin t+2\sin 2t\end{array}\right]
$](img298.png)
![$\displaystyle \left[\begin{array}{c}y\\ z\end{array}\right]
=\left[\begin{array...
...1}{3}\left[\begin{array}{c}\cos t-\cos 2t\\ -\sin t+2\sin 2t\end{array}\right]
$](img299.png) となること、
となること、 のとき
のとき
 ,
,  となることが容易に確認できる。
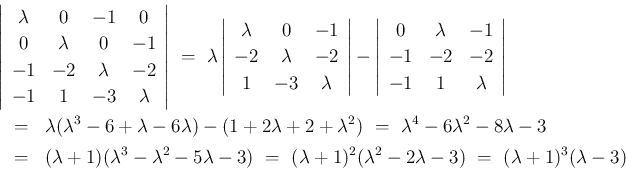
しかし、ここまでの手順はかなり長く、(16) を
単独方程式のまま特性方程式と代入法などで解く方がはるかに
短く容易である。
となることが容易に確認できる。
しかし、ここまでの手順はかなり長く、(16) を
単独方程式のまま特性方程式と代入法などで解く方がはるかに
短く容易である。
次は、(21) を考える。 こちらは最後までは計算しないが、 ジョルダン標準形位までは求めてみる。 この場合は、
![$\displaystyle Y=\left[\begin{array}{c}y_1\\ y_2\\ y_3\\ y_4\end{array}\right],
...
...],
\hspace{1zw}
F = \left[\begin{array}{c}0\\ 0\\ 0\\ e^{2t}\end{array}\right]
$](img303.png) の固有値から。
の固有値から。
 、
、 (重複度 3) となる。
(重複度 3) となる。
の固有空間は 1 次元で、固有ベクトル 1 つを求めればよい。
固有ベクトルの方程式は、
![$\displaystyle (A-3E)\mbox{\boldmath$x$}
=\left[\begin{array}{cccc}-3&0&1&0\\ 0&...
...t[\begin{array}{c}x_1\\ x_2\\ x_3\\ x_4\end{array}\right]
=\mbox{\boldmath$0$}
$](img307.png)
![\begin{eqnarray*}\lefteqn{A-3E
\ =\
\left[\begin{array}{cccc}-3&0&1&0\\ 0&-3...
...}{cccc}0&0&0&0\\ -1&1&0&0\\ -3&0&1&0\\ -3&0&0&1\end{array}\right]\end{eqnarray*}](img308.png)
 とすれば
とすれば  ,
,  ,
,  より
固有ベクトル
より
固有ベクトル
![$\displaystyle \mbox{\boldmath$v$}_1=\left[\begin{array}{c}1\\ 1\\ 3\\ 3\end{array}\right]s
$](img313.png)
 は
は  と取ればよい。
と取ればよい。
次は  の固有ベクトルを考える。この場合は、
固有空間の次元は 3 以下だが、
の固有ベクトルを考える。この場合は、
固有空間の次元は 3 以下だが、
![\begin{eqnarray*}\lefteqn{A+E
\ =\
\left[\begin{array}{cccc}1&0&1&0\\ 0&1&0&...
...ay}{cccc}0&0&0&0\\ 1&1&0&0\\ 1&0&1&0\\ -1&0&0&1\end{array}\right]\end{eqnarray*}](img316.png)
 に対する固有ベクトルは、
に対する固有ベクトルは、
![$\displaystyle \mbox{\boldmath$v$}_2=\left[\begin{array}{c}1\\ -1\\ -1\\ 1\end{array}\right]s
$](img318.png) とすればよい。
固有値 の重複度は 3 なので、この場合、
とすればよい。
固有値 の重複度は 3 なので、この場合、

 を取る必要がある。
なお、当然これらも一意に決定するわけではなく、例えば
を取る必要がある。
なお、当然これらも一意に決定するわけではなく、例えば
 は、
は、
 の自由度を持つ解が求まり、
の自由度を持つ解が求まり、
 はその に対してさらに
はその に対してさらに
 の自由度を持つ解が求まるはずである。
これらもとりあえずは
の自由度を持つ解が求まるはずである。
これらもとりあえずは  のように適当に固定してよい。
のように適当に固定してよい。
まずは
を求める。
方程式
 の解を求めるには、
拡大係数行列
の解を求めるには、
拡大係数行列
![$[A+E\ \mbox{\boldmath$v$}_2]$](img327.png) の
消去法を行う。実際には
の
消去法を行う。実際には  の部分の変形なので、その手順は
の部分の変形なので、その手順は
 の
計算と同じで、違うのは一番右側の列のみとなる。
の
計算と同じで、違うのは一番右側の列のみとなる。
![\begin{eqnarray*}\lefteqn{[A+E\ \vert\ \mbox{\boldmath$v$}_2]
\ =\
\left[\beg...
...0&0&0\\ 1&1&0&0&1/2\\ 1&0&1&0&1\\ -1&0&0&1&-3/2\end{array}\right]\end{eqnarray*}](img330.png) に対して
に対して  ,
,  ,
,  となり、
となり、
![$\displaystyle \mbox{\boldmath$v$}_3=s\left[\begin{array}{c}1\\ -1\\ -1\\ 1\end{array}\right]+\frac{1}{2}\left[\begin{array}{c}0\\ 1\\ 2\\ -3\end{array}\right]
$](img334.png)
 としたものを
とする。
最後は
を求める。分数を消すために、方程式を 2 倍して、
としたものを
とする。
最後は
を求める。分数を消すために、方程式を 2 倍して、
 を求める計算を行う。
を求める計算を行う。
![\begin{eqnarray*}\lefteqn{[A+E\ \vert\ 2\mbox{\boldmath$v$}_3]
\ =\
\left[\be...
...0&0&0&0&0\\ 1&1&0&0&2\\ 1&0&1&0&0\\ -1&0&0&1&-1\end{array}\right]\end{eqnarray*}](img338.png) は
は
![$\displaystyle \mbox{\boldmath$v$}_4
=\frac{t}{2}\left[\begin{array}{c}1\\ -1\\ ...
...ray}\right]
+\frac{1}{2}\left[\begin{array}{c}0\\ 2\\ 0\\ -1\end{array}\right]
$](img339.png) とすれば
とすれば
![$Q=[\mbox{\boldmath$v$}_1\ \mbox{\boldmath$v$}_2\ \mbox{\boldmath$v$}_3\ \mbox{\boldmath$v$}_4]$](img340.png) は
は
![$\displaystyle Q
=\left[\begin{array}{cccc}1&1&0&0\\ 1&-1&1/2&1\\ 3&-1&1&0\\ 3&1&-3/2&-1/2\end{array}\right]
$](img341.png)
![$\displaystyle J
=\left[\begin{array}{cc}J(3,1)&\raisebox{-.5ex}{\Large$0$}\\ [....
...[\begin{array}{cccc}3&0&0&0\\ 0&-1&1&0\\ 0&0&-1&1\\ 0&0&0&-1\end{array}\right]
$](img342.png)
 を求める。これも消去法で計算するが、
を求める。これも消去法で計算するが、
 (
( ) の両辺を 2 倍して、
) の両辺を 2 倍して、 に対する拡大係数行列の
消去法を行い、なるべく分数計算を避けて計算する。
に対する拡大係数行列の
消去法を行い、なるべく分数計算を避けて計算する。
![\begin{eqnarray*}\lefteqn{[Q\ \vert\ 2E]
=
\left[\begin{array}{cccc\vert cccc...
...5&-4\\
0&0&8&0 &5&-2&3&-4\\ 0&0&0&2 &1&2&-1&0\end{array}\right]\end{eqnarray*}](img346.png)
![$\displaystyle Q^{-1}=\frac{1}{32}
\left[\begin{array}{cccc}3&2&5&4\\ 29&-2&-5&-...
... 29/32&-1/16&-5/32&-1/8\\
5/8&-1/4&3/8&-1/2\\ 1/2&1&-1/2&0\end{array}\right]
$](img347.png)
![\begin{eqnarray*}e^{J(3,1)t}
&=&
e^{3t},
\\
e^{J(-1,3)t}
&=&
e^{-t}\left...
...eft[\begin{array}{ccc}1&t&t^2/2\\ 0&1&t\\ 0&0&1\end{array}\right]\end{eqnarray*}](img348.png)
![$\displaystyle e^{Jt}
=\left[\begin{array}{cc}e^{J(3,1)t}&\raisebox{-.5ex}{\Larg...
...t}&te^{-t}&t^2e^{-t}/2\\
0&0&e^{-t}&te^{-t}\\ 0&0&0&e^{-t}\end{array}\right]
$](img349.png)
 で が求まり、
(25) を使えば
で が求まり、
(25) を使えば  が求まる、
ということになる。
しかし、この先もかなり大変な計算が待っていることが想像できる。
が求まる、
ということになる。
しかし、この先もかなり大変な計算が待っていることが想像できる。
公式 (24), (25) は
一見シンプルな形であり、理論展開には便利で重要だが、
具体的な計算に向くかといえばそうでもなく、
特に大きな ではあまり実用的ではないことが
これらの例からもわかる。
具体的な計算目的なら、むしろ単独方程式の方を特性方程式と代入法や 定数変化法 (やラプラス変換) などで解く方が易しい場合が多いだろう。
竹野茂治@新潟工科大学

![$\displaystyle
\begin{array}{l}
\left\{\begin{array}{ll}
y_1' &= a_{11} y_1+a...
... [.5zh]
\hspace{1zw}(\mbox{$y_j=y_j(t)$: 未知、$a_{ij},f_j(t)$: 既知})
\end{array}$](img243.png)





![$\displaystyle
\left[\begin{array}{c}y\\ z\end{array}\right] = e^{At}\left[\beg...
...right]
+\int_0^te^{A(t-s)}\left[\begin{array}{c}0\\ \cos s\end{array}\right]ds$](img280.png)


![$\displaystyle Q\left[\begin{array}{cc}e^{-2it}&0\\ 0&e^{2it}\end{array}\right]...
...&e^{2it}\end{array}\right]
\left[\begin{array}{cc}2&i\\ 2&-i\end{array}\right]$](img288.png)
![$\displaystyle \frac{1}{4}\left[\begin{array}{cc}e^{-2it}&e^{2it}\\ -2ie^{-2it}&2ie^{2it}\end{array}\right]
\left[\begin{array}{cc}2&i\\ 2&-i\end{array}\right]$](img289.png)
![$\displaystyle \frac{1}{4}\left[\begin{array}{cc}2e^{-2it}+2e^{2it}& ie^{-2it}-i...
...ft[\begin{array}{cc}4\cos 2t& 2\sin 2t\\ -8\sin 2t& 4\cos 2t\end{array}\right]$](img290.png)
![$\displaystyle \left[\begin{array}{cc}\cos 2t& \sin 2t/2\\ -2\sin 2t& \cos 2t\end{array}\right]$](img291.png)